

 Ajouter à une liste de lecture
Ajouter à une liste de lecture
Le développement de systèmes embarqués se doit d’optimiser l’utilisation des ressources de stockage, de calcul et énergétiques. En aucun cas compiler sur la plateforme embarquée cible ne respecte ces contraintes. Nous présentons Buildroot pour cross-compiler un système GNU/Linux efficacement, et le bénéfice en termes de performances qu’on en tirera.
Les plateformes qualifiées actuellement d’embarquées – Raspberry Pi, Beagle Bone, Red Pitaya, PlutoSDR, STM32MP157 et autres – fournissent plus de puissance de calcul que bien des ordinateurs personnels d’il y a quelques années. Plutôt que promouvoir l’utilisation de ces dispositifs comme des ordinateurs généralistes exécutant des distributions binaires aux performances réduites par la plateforme aux ressources les plus faibles, nous allons promouvoir l’optimisation des performances par la génération d’une chaîne de compilation, noyau, bootloader et applicatifs par Buildroot [1, 2, 4]. Afin de démontrer la puissance de l’approche, nous exécuterons GNU Radio – bibliothèque de traitement du signal compatible avec l’analyse en flux tendu de signaux radiofréquences impliquant une multitude de dépendances – sur diverses plateformes cibles embarquant des cœurs ARM. Ce document accompagne la présentation proposée au FOSDEM 2021 [5].
1. Introduction
GNU Radio fait partie des infrastructures considérées comme très pénibles à compiler à la main, compte tenu de la multitude de dépendances, et en particulier vers une cible dont l’architecture de processeur diffère de celle de l’hôte (généralement, un ordinateur personnel équipé d’un processeur compatible Intel x86). Diverses solutions sont proposées, du script qui tente d’automatiser la séquence de compilation (obsolète avec le passage à GNU Radio 3.8 en seconde moitié 2019) à PyBOMBS (bonne chance pour cross-compiler). En désespoir de cause, nombre d’utilisateurs s’abaisseront aux deux solutions antagonistes avec les préceptes du développement sur système embarqué (Fig. 1) : passer par une distribution binaire type Raspbian [6] (maintenant Raspberry Pi OS qui semble une aberration puisque simplement un port de Debian pour ARM dédié aux Raspberry et aucunement un « OS » à part entière) lorsqu’elle existe, avec les défauts de performance d’une unique distribution ciblée vers une multitude de plateformes, ou compiler sur la cible, supposant un espace de stockage suffisant pour contenir le compilateur et ses bibliothèques (essayez de compiler GNU Radio sur les 32 MB d’une PlutoSDR).

Pourquoi affirmer qu’une distribution binaire généraliste n’est pas appropriée pour un système embarqué ? La réponse est évidente avec les anciennes versions de Raspbian qui abordaient toutes les Raspberry Pi (RPi) et donc devaient se contenter du plus petit dénominateur commun, à savoir le cœur 32 bits de pré-RPi 3. La situation change un peu avec une version de test supportant les instructions 64 bits, mais reste toujours sous-optimale, notamment sur l’utilisation des extensions d’instruction SIMD (Single Instruction Multiple Data) supportées par NEON sur ARM. Prenons le cas de VOLK (Vector-Optimized Library of Kernels) qui est intensivement utilisé par GNU Radio pour optimiser les calculs vectoriels en utilisant les instructions SIMD (pour ceux à qui calcul vectoriel et SIMD ne disent rien : penser CRAY [7]). Lors de l’installation de VOLK, une étape d’optimisation sélectionnant la méthode la plus rapide d’atteindre chaque résultat est tabulée par volk_config. Évidemment, cet outil ne peut tester que les instructions supportées par le compilateur. Comparons quelques résultats de volk_config entre Raspbian (version 64 bits du 27 mai 2020), Buildroot (version Git d’août 2020 avec volk 2.0.0) [8] et Ubuntu 20.10 avec volk 2.3.0-3. On notera que Raspbian et Ubuntu sélectionnent par défaut le mode ondemand du processeur qui le laisse traîner à 600 MHz (tel que l’annonce /sys/devices/system/cpu/cpu0/cpufreq/scaling_cur_freq) en veille pour l’accélérer à 1500 MHz lors des calculs, tandis que Buildroot laisse le processeur en powersave qui le maintient à 600 MHz. Pour rendre la comparaison réaliste, nous avons aussi passé le processeur (version Buildroot) en performance qui le maintient à 1500 MHz. Bien sûr, Ubuntu s’en sort bien dans ce test de vitesse et pourrait fournir une solution crédible, mais essayez de faire tenir une telle distribution généraliste dans les 32 MB de stockage non volatil d’une PlutoSDR !
Le tableau 1, issu de l’analyse de VOLK par volk_config sur un système généré par Buildroot avec la configuration par défaut du processeur en powersave (cadencé alors à 600 MHz), puis en performance (cadencé alors à 1500 MHz) et avec un système Raspbian 64 bits (processeur en mode ondemand qui passe à 1500 MHz lors de la configuration de VOLK, image nommée 2020-05-27-raspios-buster-arm64.img) résume les performances des principales fonctions extraites sous forme de leur temps d’exécution. La mise en forme s’est contentée de mettre en gras le nom de la fonction, en vert les appels à l’accélérateur SIMD des instructions NEON, et en rouge la méthode générique exploitant les instructions ARM du processeur. Même en mode d’économie d’énergie ralentissant la vitesse du processeur, l’exploitation des instructions NEON est plus rapide que la même fonction exécutée par la méthode générique de Raspbian, poussant le processeur à sa vitesse maximale.
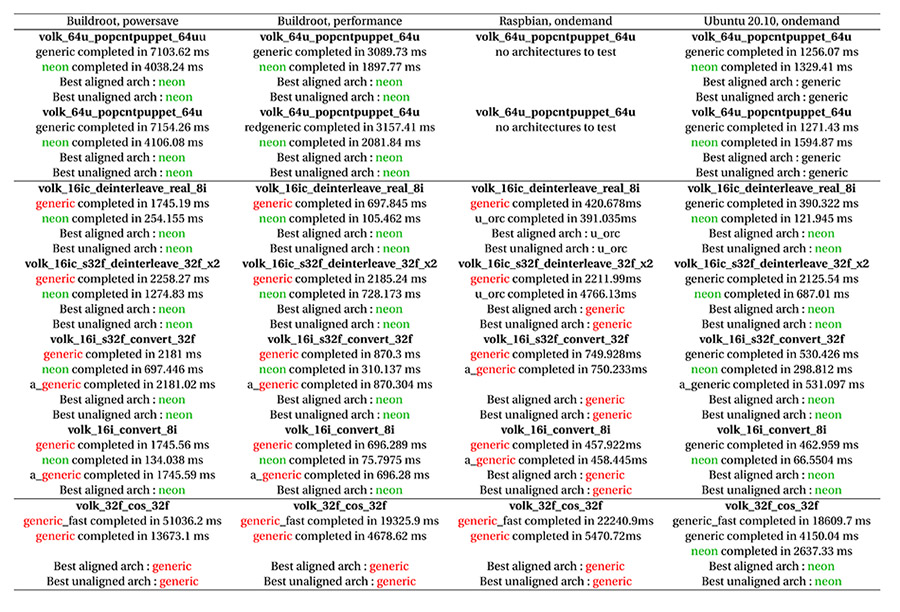
Nous constatons sur ce tableau que :
- Raspbian ne connaît pas le support de NEON et ne peut donc évidemment pas en profiter (2 instructions du haut) ;
- que dans tous les cas où la méthode générique se compare à la méthode NEON, le gain en temps de calcul est incontestable (4 instructions du milieu) avec des facteurs allant de 3 à 9 sur la réduction de temps d’exécution ;
- que lorsque la méthode générique est sélectionnée (instruction du bas), Buildroot se comporte à l’identique de Raspbian dans la barre d’incertitude de la mesure ;
- Ubuntu 20.10 dans laquelle nous avons installé sudo apt-get install libvolk2-dev gagne haut la main tous les tests de vitesse lors de volk_profile ! Cependant, cette distribution occupant plus de 3 GB sur une carte SD pour un environnement Desktop ne répond aucunement aux exigences d’un système embarqué (p. ex. 32 MB de mémoire non volatile sur PlutoSDR).
Pour toutes ces raisons, nous allons développer ici l’utilisation de Buildroot pour générer les outils de développement sur cible embarquée, et illustrerons sur le cas particulier de GNU Radio qui a été incorporé dans la liste des paquets supportés.
L’obsession sur le support des instructions SIMD traduit simplement le fait que nombre de problèmes s’expriment naturellement sous forme d’algèbre linéaire avec des opérations matricielles sur des vecteurs, et que manipuler des vecteurs correspond à effectuer la même opération (Single Instruction) sur chaque élément du vecteur (Multiple Data). L’implémentation matérielle de ces opérations, en pointant sur une zone mémoire et en effectuant le même calcul sur les éléments adjacents du tableau, réduit considérablement le temps d’exécution, comme nous venons de le voir.
Buildroot vs OpenEmbedded/Yocto
Un des membres actifs de la liste de diffusion des développeurs GNU Radio – Philip Balister – est développeur OpenEmbedded/Yocto (https://github.com/balister/meta-sdr). La question se pose donc de la promotion de Buildroot alors que GNU Radio est fourni comme paquet de OpenEmbedded/Yocto [9]. La différence philosophique fondamentale entre OpenEmbedded/Yocto et Buildroot tient en la notion de distribution. OpenEmbedded/Yocto compile tout, encapsule les binaires résultants sous forme de paquet binaire, occupant un espace disque significatif (80 GB) et nécessitant un temps de compilation certain. Le bénéfice à terme est un ensemble de paquets que les utilisateurs ignorants du développement sur système embarqué pourront déployer. Au contraire, Buildroot génère une image binaire ne contenant que les applicatifs nécessaires, pour un volume d’espace disque considérablement réduit (typiquement 8 GB), mais nécessitant de régénérer une nouvelle image à chaque nouvel ajout. Les deux philosophies diffèrent donc dans leur objectif, Buildroot fournissant une solution dédiée à une application bien définie, OpenEmbedded/Yocto générant une distribution applicable à nombre de projets différents. Dans un contexte éducatif de diffusion des outils à une classe d’étudiants, l’utilisation de Buildroot peut être discutable compte tenu de l’hétérogénéité des objectifs de chacun, mais pour une cible bien définie, le bénéfice de Buildroot est incontestable.
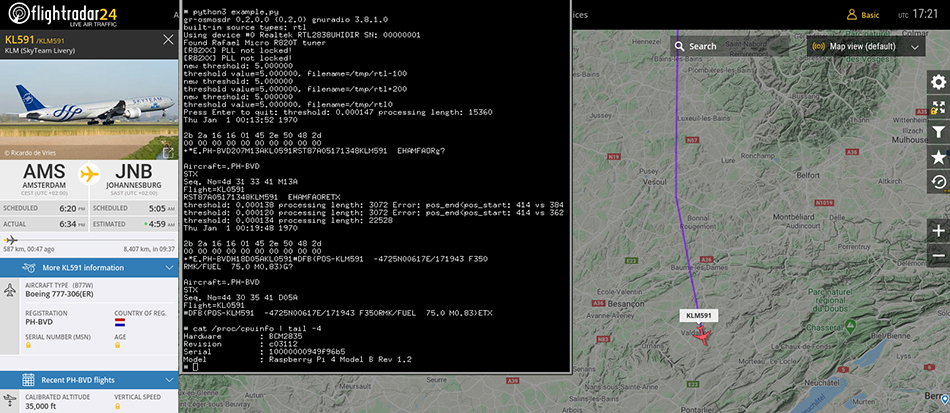
Nous insistons sur la généralité de l’approche proposée : nous ne développerons pas ici la PlutoSDR qui est aussi supportée, mais démontrerons la chaîne de cross-compilation sur RPi (3 et 4 avec leurs cœurs 64 bits et instructions NEON) et le STM32MP157 de STMicroelectronics qui, malgré des ressources de calcul bien plus faibles, est fourni avec un écran qui permet d’illustrer une interface graphique sur système embarqué. Dans le cas des RPi, la démonstration portera sur une acquisition sur plateforme embarquée (p. ex. gr-acars pour recevoir les messages des avions), voire un transfert vers l’ordinateur personnel (PC) hôte après un prétraitement sur la plateforme embarquée, que nous illustrerons par l’envoi du signal audiofréquence issu de la démodulation de stations dans la bande FM.
2. Concepts et prise en main de Buildroot
Avant de se lancer dans la prise en main de Buildroot, il est utile de comprendre la philosophie sous-jacente. Buildroot est une infrastructure de cross-compilation – donc travailler sur un environnement de calcul puissant, généralement un PC compatible Intel x86, pour générer du code à destination d’une cible embarquée aux ressources contraintes, généralement un processeur ARM, mais potentiellement PowerPC ou RISC-V – qui fournit un ensemble cohérent de compilateur pour l’hôte, ainsi que pour la cible un code de démarrage (bootloader, généralement uboot), un noyau (Linux), des bibliothèques et des exécutables en espace utilisateur (rootfs).
Nous utilisons ici la nomenclature qui nous suivra tout au long de cet exposé : hôte pour l’ordinateur puissant sur lequel nous développons, cible pour la carte embarquée aux ressources contraintes. Contrairement aux distributions binaires (Debian ou Raspbian sur RPi, Suse, Redhat...) ou aux infrastructures de cross-compilation OpenEmbedded et Yocto qui génèrent une bibliothèque de paquets binaires à installer, Buildroot compile uniquement les applications sélectionnées et conclut sa compilation par une unique image contenant tous les outils pour démarrer et exécuter la plateforme embarquée. Tout ajout de fonctionnalité se traduit par la génération complète d’une nouvelle image. Cette cohérence évite bien des déboires lors de la compilation sur l’hôte d’applications ou modules noyau pour la cible, alors qu’on ne compile jamais sur la cible de ressources réduites et dont la vocation est de contrôler un système embarqué et non d’être munie d’un compilateur aussi lourd et complexe que GCC.
L’arborescence de Buildroot peut apparaître impressionnante au premier abord. Contentons-nous de mentionner que
- tout ce qui est produit par Buildroot est placé dans output. Ainsi, effacer output remet Buildroot dans on état initial (au fichier de configuration .config près) ;
- tout ce qui est produit pour l’hôte (PC généralement) se trouve dans output/host – inutile donc de tenter d’exécuter un binaire de ce répertoire sur la cible ;
- tout ce qui est produit pour la cible se trouve dans output/target – inutile donc de tenter d’exécuter un binaire de ce répertoire sur l’hôte ;
- le répertoire configs contient les configurations par défaut pour nombre de plateformes, par exemple raspberrypi4_64_defconfig pour la RPi 4 en mode 64 bits, raspberrypi3_64_defconfig pour la RPi 3 en mode 64 bits, ou stm32mp157c_dk2_defconfig pour le STM32MP1. Ces configurations sont appliquées par make raspberrypi4_64_defconfig dans le répertoire racine de Buildroot (adapter évidemment le defconfig sélectionné à sa cible) ;
- le répertoire package contient la description des paquets reconnus par Buildroot.
Buildroot est configurable intuitivement par une séquence de menus en mode ligne de commande accessible par make menuconfig. À l’issue de la configuration, make génère dans output/images le résultat de sa compilation, à savoir l’image prête à flasher sur carte SD (sdcard.img) qui contient le noyau Image, le système de fichiers (rootfs.ext4), l’image de la partition contenant le bootloader boot.fat) et le devicetree décrivant la configuration matérielle (*.dtb), tous ces fichiers étant accessibles indépendamment, et fort utiles pour une exécution dans QEMU, telle que nous la verrons en section 10.
L’ajout de paquets dans Buildroot est la partie la plus intéressante, mais étant très bien documenté à https://buildroot.org/downloads/manual/manual.html#adding-packages, nous nous contentons de mentionner ici que nous avons rencontré bien des difficultés liées à la gestion (ou l’absence de...) des dépendances. Nous repoussons à la section 12 cette description détaillée pour mettre en garde ici contre l’ajout incrémental de fonctionnalités qui induisent des dépendances dans des paquets déjà compilés qui ne seront pas mis à jour sans la commande make paquet-reconfigure avec paquet le nom, trouvé dans output/build, de la dépendance à reconfigurer après l’ajout d’une fonctionnalité par make menuconfig. Ce point est discuté dans https://buildroot.org/downloads/manual/manual.html#full-rebuild : « if this package is a library that can optionally be used by packages that have already been built, Buildroot will not automatically rebuild those »...
Cas particulier : le noyau Linux
Appliquer make linux-reconfigure va écraser la configuration sélectionnée par make linux-menuconfig et replacer la configuration par défaut sélectionnée par Buildroot. Dans ce cas, on utilisera make linux-rebuild. Ceci est vrai pour tous les métapaquets configurés, notamment Busybox et uBoot.
Lors de sa première compilation, Buildroot télécharge toutes les archives et les stocke dans le répertoire dl. Les compilations ultérieures sont ainsi accélérées, voir possibles sans connexion internet. Si plusieurs Buildroot cohabitent sur le même hôte, la variable d’environnement BR2_DL_DIR permet d’informer toutes les copies de Buildroot de stocker et chercher leurs archives dans ce répertoire : gain de temps et de place.
Pour installer Buildroot sur RPi 4, tel que décrit à https://github.com/buildroot/buildroot/tree/master/board/raspberrypi, mais la documentation de cette page n’est pas à jour (?!) :
1. git clone https://github.com/buildroot/buildroot
2. cd buildroot
3. make raspberrypi4_64_defconfig
qui récupère l’arborescence de Buildroot, et la configure pour la RPi 4 en mode 64 bits (pour la RPi 3, sélectionner raspberrypi3_64_defconfig). Le cas du STM32MP157 est traité en détail à https://bootlin.com/blog/building-a-linux-system-for-the-stm32mp1-basic-system/ et sera repris plus loin.
L’approche pédagogique idéale aurait été de progressivement ajouter les fonctionnalités à Buildroot en partant d’un système basique et en ajoutant petit à petit les fonctionnalités. Cependant, il est apparu à l’usage que Buildroot ne sait pas détecter des incohérences entre dépendances de paquets, si la configuration est modifiée dynamiquement lors de la génération d’une image. Cette déficience est introduite par l’utilisation de Kconfig comme gestionnaire de configuration, au même titre que Linux, NuttX ou Zephyr. Ainsi, si GNU Radio a été activé, mais qu’un support de matériel (UHD, OsmoSDR) ou de l’interface graphique (Qt5) a été oublié, il n’est pas simplement possible d’activer ces fonctions et régénérer l’image. Il faut absolument reconfigurer GNU Radio (make gnuradio-reconfigure) après avoir activé les nouvelles fonctions pour que Buildroot décide de recompiler GNU Radio avec ces nouvelles dépendances.
Nous serons donc obligés à chaque ajout d’une nouvelle fonctionnalité de make clean avant de make qui refabriquera tout le contenu de output, opération longue et pénible, mais nécessaire pour ne pas se heurter à des erreurs de dépendances inextricables. Pour les impatients, on pourra placer le fichier de configuration vérifiant toutes les dépendances de GNU Radio avec support des récepteurs DVB-T RTL-SDR fourni à https://github.com/oscimp/PlutoSDR/tree/master/configs/raspberrypi4_64_gnuradio_defconfig (RPi 4) ou https://github.com/oscimp/PlutoSDR/tree/master/configs/raspberrypi3_64_gnuradio_defconfig (RPi 3) dans le répertoire configs de Buildroot et appliquer la règle idoine pour configurer Buildroot. Dans ce cas, make suffira après cette configuration à générer une image fonctionnelle, sans passer par toutes les configurations décrites ci-dessous, puisque déjà prises en charge par les fichiers proposés.
La suite de cette section décrit les étapes pour retrouver la configuration proposée ci-dessus. Puisque le support Python de GNU Radio nécessitera la bibliothèque glibc au lieu de uClibc sélectionnée par défaut, nous ajustons la configuration initiale par :
4. make menuconfig
5. Toolchain -> C library (uClibc-ng) -> glibc
6. Activer Enable C++ support
7. Exit
Une fois la bonne bibliothèque sélectionnée :
8. make
compile l’ensemble des outils. Cette opération prend environ 40 minutes sur un processeur Xeon à 8 cœurs cadencés à 2,33 GHz avec une connexion internet rapide, et occupe environ 7,4 GB sur le disque dur. À l’issue de la compilation, nous trouvons dans output/images l’image sdcard.img à transférer sur la carte uSD en vue d’en exécuter le contenu sur RPi. Ici, « transférer » ne signifie par copier, car nous devons écrire octet par octet le contenu du fichier .img sur la carte. Cette opération est prise en charge sous GNU/Linux par dd.
La ligne qui va suivre peut corrompre le disque dur si le mauvais périphérique est sélectionné. Toujours vérifier le nom du périphérique associé à la carte SD (dmesg & tail) avant de lancer la commande dd.
L’image résultant de la compilation est transférée sur la carte SD par :
où nous avons volontairement choisi le périphérique /dev/sdc dans cet exemple, car rarement utilisé : en pratique, la carte SD sera souvent nommée /dev/sdb (second disque dur compatible avec le pilote SCSI de Linux) ou /dev/mmcblk0 (cas du lecteur SD interne).
En cas d’utilisation d’un gestionnaire de fichiers ou de bureau, bien vérifier que la carte SD n’est pas prise en charge par ces outils (eject) qui risquent d’interférer avec dd.
Attention : nous répétons que le contenu de la carte SD, ou de tout support pointé par le dernier argument de cette commande, sera irrémédiablement perdu. Vérifier à deux (non, trois) fois le nom du périphérique cible de l’image issue de Buildroot.
Une fois l’image flashée sur la carte SD, nous constaterons deux partitions : une première en VFAT (format compatible Microsoft Windows) avec le devicetree, le noyau Linux et le bootloader, et une seconde partition contenant le système GNU/Linux (rootfs).
On notera que la configuration de la plateforme ainsi générée, qui est stockée dans .config, peut être mémorisée par make savedefconfig qui écrase le fichier defconfig original dans configs (qui peut évidemment toujours être récupéré par git checkout). Cette méthode a été utilisée pour générer les *gnuradio_defconfigs proposés ci-dessus. Par ailleurs, toutes les commandes que nous avons énoncées pour le moment impactent Buildroot uniquement, sa chaîne de compilation et ses paquets. Pour configurer le noyau Linux et notamment ses pilotes, la commande make linux-menuconfig ouvrira le menu de configuration du noyau qui se trouve dans output/build/linux-*, utile pour localiser les sources du noyau lors de la compilation de modules personnalisés.
3. GNU Radio avec Python 3 et OsmoSDR
La longue description du concept de paquets en début de ce texte visait à introduire le fait que nous ne pouvons pas ajouter progressivement les fonctionnalités à Buildroot. L’ajout de GNU Radio implique de nombreuses étapes, que nous devons toutes effectuer lors de cette étape de configuration, si nous ne voulons pas corrompre les dépendances entre paquets.
Nous ferons l’hypothèse dans un premier temps d’un utilisateur désireux de recevoir des signaux radiofréquences avec un récepteur de télévision numérique terrestre (DVB-T) comportant un récepteur R820T2 couplé à un RTL2832U comme convertisseur analogique/numérique communiquant par USB, mais pas d’afficher un résultat sur interface graphique afin d’alléger la séquence de compilation et la taille de l’image résultante (mais capable uniquement d’exécuter des flux de traitement générés par GNU Radio Companion en mode No GUI dans les Options -> Generate Options). Il nous faut maintenant activer les paquets nécessaires. Pour ce faire, exécuter dans le répertoire de Buildroot la commande make menuconfig et sélectionner Target packages. On rappelle que la recherche (« / » comme dans Vi) permet de facilement trouver l’emplacement d’un paquet, par exemple GNU Radio :
- make menuconfig
- /eudev
- Sélectionner la dernière option indiquée par BR2_ROOTFS_DEVICE_CREATION_DYNAMIC_EUDEV et remplacer /dev management par Dynamic using devtmpfs + eudev
- /python3
- Sélectionner l’option (4) indiquée par BR2_PACKAGE_PYTHON3
- /gnuradio
- Sélectionner l’option (1) indiquée par BR2_PACKAGE_GNURADIO
- Sélectionner les options additionnelles de GNU Radio selon les besoins (nous aurons besoin de gr-zeromq support et python support)
- /osmosdr
- Sélectionner BR2_PACKAGE_GR_OSMOSDR (avec support Python et support Osmocom RTLSDR)
La première option sert à gérer l’insertion dynamique du récepteur radiofréquence sur le bus USB, la deuxième active le support Python 3, la troisième GNU Radio, et la quatrième le support du récepteur DVB-T. Une fois cette configuration achevée, make se charge de fabriquer une image fonctionnelle. Le fichier résultant fera environ 500 MB, nécessitant d’augmenter la taille disponible dans .config par BR2_TARGET_ROOTFS_EXT2_SIZE="520M" ou, plus élégant, de définir dans make menuconfig l’option Filesystem Images -> exact size.
À l’issue de la génération de l’image, le bon fonctionnement de GNU Radio sera validé en se connectant (SSH) sur la RPi 4 et, au prompt de Python 3, en proposant la commande import gnuradio qui doit se conclure par un retour au prompt, sans message d’erreur.
4. Support de l’Ettus Research B210
Le récepteur DVB-T est une solution faible coût pour aborder la radio logicielle, mais ne propose qu’une bande passante réduite et ne peut travailler que sur une porteuse allant jusqu’à 1,6 GHz. Les plateformes matérielles de Ettus Research sont bien plus performantes (et plus chères), capables de travailler jusqu’à 6 GHz en couvrant notamment la bande Industrielle, Scientifique et Médicale (ISM) des 2,4 GHz (donc tous les modes de communication numériques tels que Wi-Fi, Bluetooth, Zigbee...) et surtout d’exploiter pleinement le bus USB3 de la RPi 4 pour augmenter la bande passante d’acquisition limitée par le débit de communication. Les diverses plateformes USRP (Universal Software Radio Peripheral) commercialisées par Ettus Research sont contrôlées par une bibliothèque unique USRP Hardware Driver ou libuhd. Cette bibliothèque s’active désormais dans Buildroot, mais nécessite encore de manuellement charger les images (firmware) pour configurer le FPGA embarqué. Si la plateforme embarquée est connectée à Internet, le script Python uhd_images_downloader, fourni par uhd-utils, se chargera de télécharger les fichiers binaires correspondant à la version de libuhd et les placer dans /usr/share/uhd/images. Ici encore, si libuhd est ajouté a posteriori, toute erreur de dépendance sera résolue par make dépendance-reconfigure, par exemple pour pallier aux déficiences de la dépendance boost. Si la même version de libuhd est installée sur l’hôte, nous pourrons exécuter uhd_images_downloader sur le PC et copier les fichiers binaires vers la cible. Sinon, le dernier recours est d’aller chercher manuellement les images binaires à https://files.ettus.com/binaries/cache/ et de placer les images dans le répertoire adéquat.
5. Ajouter des packages externes : BR2_EXTERNAL
Analog Devices propose la plateforme PlutoSDR pour une centaine d’euros avec des performances proches de celles proposées par Ettus Research (mais une communication sur bus USB2 qui limite la bande passante de transfert). Le support de cette plateforme n’est pas intégré dans la version officielle de Buildroot, Analog Devices ayant fait le choix de dupliquer (fork) le dépôt de Buildroot pour y intégrer ses propres modifications à https://github.com/analogdevicesinc/buildroot. Cette solution rend, d’une part, la maintenance sur le long terme complexe, car Analog Devices doit régulièrement synchroniser son dépôt avec la version officielle et gérer manuellement les divergences entre les deux dépôts, et d’autre part empêche les utilisateurs de profiter rapidement des évolutions de Buildroot entre deux resynchronisations. Il semble donc plus pertinent d’ajouter des fonctionnalités externes à une version donnée de Buildroot par le mécanisme décrit ci-dessous.
Jusqu’ici, nous n’avons travaillé qu’avec les paquets Buildroot « officiels » maintenus par la communauté des développeurs de Buildroot. Certains paquets ne sont pas encore intégrés sur le site officiel, mais peuvent néanmoins compléter l’installation en cours grâce au mécanisme de BR2_EXTERNAL. Un exemple est le support de la PlutoSDR grâce à gr-iio, qui est fourni dans le dépôt BR2_EXTERNAL disponible à https://github.com/oscimp/PlutoSDR et plus spécifiquement dans la branche for_next. Ainsi, après être sorti du répertoire Buildroot pour créer une nouvelle arborescence :
- git clone https://github.com/oscimp/PlutoSDR
- cd PlutoSDR
- git checkout for_next
- source sourceme.ggm
L’approche BR2_EXTERNAL est une solution intéressante dès lors que l’utilisateur souhaite stocker des configurations personnalisées, que ce soit dans le cas d’un projet particulier ou pour éviter, comme au début de cet article, d’avoir à copier le fichier de configuration manuellement, ainsi que des packages en cours de validation. Dans le dernier cas, il ne faut pas voir cette solution comme une fin en soi. Si un package est validé, il est important de le proposer en vue d’une intégration dans le dépôt officiel. En effet, si l’utilisateur a éprouvé le besoin de ce paquet, il n’est pas impossible que ce soit également le cas pour d’autres personnes. Cette démarche est aboutie pour libuhd (https://git.buildroot.net/buildroot/log/package/uhd qui illustre la séquence et latence entre la soumission initiale du paquet et son acceptation) et en cours pour gnss-sdr.
Maintenant que le dépôt BR2_EXTERNAL a été téléchargé, la branche appropriée sélectionnée, et les variables d’environnement définies (dernière commande), retourner dans le répertoire de Buildroot et make menuconfig. L’exécution de make menuconfig donne maintenant accès à un nouveau menu External options qui inclut gr-iio, libad9361-iio ou gnss-sdr.
Afin d’ajouter le transfert de données radiofréquences de la PlutoSDR par GNU Radio, sélectionner dans External options l’option gr-iio. Afin d’ajouter le support des plateformes USRP de Ettus Research, sélectionner dans External options le paquet uhd, et pour le cas particulier de la B210, cocher b200 support et python API support.
Nous pouvons par ailleurs ajuster la configuration avant de dd l’image sur la carte SD en ajoutant des fichiers dans output/target, par exemple une configuration statique du réseau dans /etc/network/interfaces, ou copier les firmwares des USRP depuis le PC hôte dans le sous-répertoire /usr/share/uhd/images de output/target, afin que ces fichiers soient ultérieurement disponibles sur la cible embarquée. Une fois le contenu de output/target convenablement ajusté, retourner dans le répertoire racine de Buildroot et exécuter make pour régénérer le fichier output/images/sdcard.img.
6. GNU Radio sur Raspberry Pi 3/4
À titre d’illustration de la façon que nous abordons d’utiliser GNU Radio sur plateforme embarquée, nous générons en utilisant GNU Radio Companion sur le PC une application en ligne de commande (« No GUI ») puisqu’évidemment aucune interface graphique ne devrait être disponible sur la cible embarquée. Le script Python 3 résultant sera exécuté sur la RPi. Le flux audiofréquence résultant de la démodulation du signal de la bande FM commerciale sera transmis au PC pour être joué sur la carte son.
Son sur la Raspberry Pi 4
Nous sommes mitigés sur la solution la plus simple à mettre en œuvre, entre utiliser la carte son du PC après communication du flux audio issu de la démodulation par la RPi 4 qui suppose une configuration TCP/IP correcte pour transmettre les données (de toute façon nécessaire pour envoyer le fichier Python du PC vers la RPi 4), ou émettre le son sur la sortie jack audio 3,5 mm de la RPi 4 avant de s’attaquer au réseau. Le lecteur désireux de tester la seconde solution peut :
1. activer le son sur l’image Buildroot en éditant dans la première partition de la carte SD le fichier config.txt pour y ajouter l’option dtparam=audio=on. Au prochain boot, le message bcm2835_audio bcm2835_audio: card created with 8 channels s’affichera ;
2. valider que le son fonctionne en activant le paquet speaker-test de alsa-utils de Target packages -> Audio and video applications et en exécutant speaker-test -t sine -f 440 pour jouer un La sur la sortie écouteurs ;
3. valider que la carte son est bien vue par GNU Radio avec la chaîne de traitement triviale ci-dessous à gauche, en notant que les deux entrées audio doivent être connectées :

La génération du script Python et son transfert sur RPi 4 pour exécution sont décrits dans le texte ;
4. étendre la chaîne de traitement de gauche avec la source Osmocom et la démodulation FM après avoir sélectionné par un filtre passe-bas une unique station pour jouer le son sur la sortie audio.
Sur le PC, lancer GNU Radio Companion (fourni par GNU Radio 3.8) et générer la chaîne de traitement de la Fig. 2 :
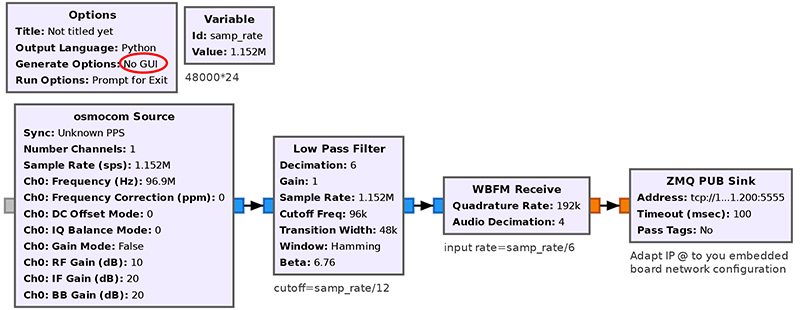
Le script Python ainsi généré est transféré à la RPi. Bien prendre soin d’adapter l’adresse IP de la liaison TCP sur 0MQ à l’adresse de la RPi : le serveur est exécuté sur la plateforme embarquée et en utilisant une liaison de type publish-subscribe (s’apparentant à une liaison UDP), tout client se connectant au serveur exécuté sur la cible embarquée peut recevoir le flux de données. L’adresse IP sera incluse idéalement dans le sous-réseau du PC pour simplifier la configuration du routage, tandis que le port peut être toute valeur au-dessus de 1024. La seule contrainte sur cette chaîne de traitement est d’aboutir à la fin à une fréquence d’échantillonnage égale à une valeur compatible avec la carte son du PC (ici 48 kHz) après une séquence de décimations par des facteurs entiers, objectif atteint en sélectionnant ici une fréquence d’échantillonnage initiale de 48 kS/s. Le premier filtre passe-bas sélectionne une unique station FM tout en gardant assez de bande passante (≥ 200 kHz) pour la démodulation FM à bande large, et le démodulateur FM ajoute un second étage de décimation.
7. Communication Raspberry Pi vers PC
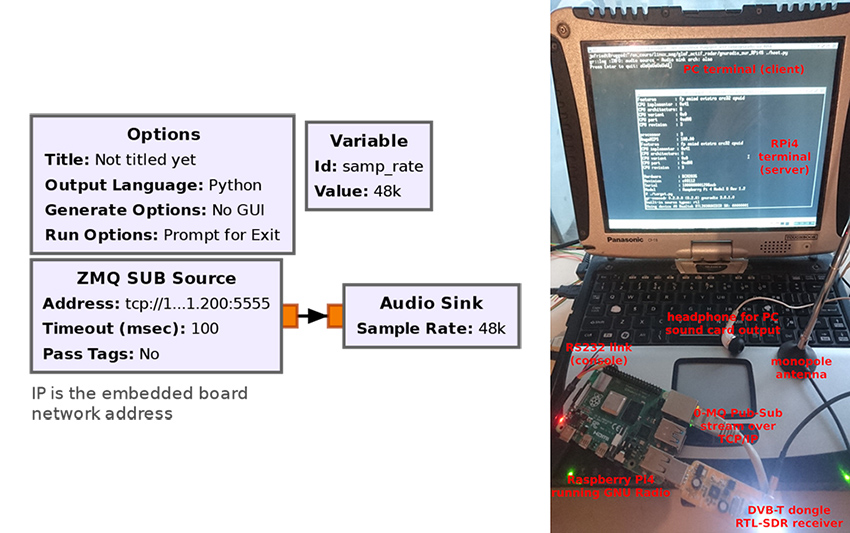
Après traitement des données radiofréquences brutes (I/Q) acquises sur la bande FM commerciale par la RPi, et avoir prétraité le signal FM sur la plateforme embarquée, le flux audiofréquence est transmis vers le PC par 0MQ. Cette surcouche à TCP/IP (https://rfc.zeromq.org/spec/13/) propose deux modes de communication, connectée tout comme TCP et non connectée tout comme UDP. Dans le premier cas, le transfert de données est garanti et acquitté par l’interlocuteur, dans le second cas le serveur jette les données sur le réseau et si un client les capture, elles seront traitées, sinon elles sont simplement perdues et l’acquisition se poursuit sur le serveur indépendamment de la connexion d’un client. C’est ce second mode qui nous intéresse ici, nommé publish (serveur RPi) - subscribe (client PC).
La RPi a vu son interface réseau configurée sur le même sous-réseau que le PC, et nous prendrons soin de faire pointer l’adresse du serveur vers un port associé à l’adresse IP de la carte Ethernet de la RPi (et non pas 127.0.0.1) pour écouter toute requête de connexion venant du PC, par exemple par tcp://192.168.0.42:5555. Ainsi, le PC connectera son client subscribe sur cette même adresse pour en récupérer le flux de données (Fig. 3).
Ce résultat peut paraître trivial, mais démontre un concept fondamental de la réception de signaux radiofréquences : les étapes successives de traitement ne peuvent que perdre de l’information, et comme nous l’a expliqué Shannon [10], le débit d’information est directement lié à la bande passante du signal. Réduire le contenu d’information du signal lors des démodulations successives ne peut que retirer de l’information (la redondance introduite par la modulation FM, par exemple) et donc réduire l’encombrement spectral du signal, donc le débit de communication nécessaire à le communiquer. Cela explique que dans un récepteur de radio logicielle, nous nous efforçons de prétraiter le signal acquis au maximum dans le FPGA qui acquiert les flux de données radiofréquences après transposition en bande de base pour atteindre le débit de communication acceptable avec le processeur généraliste. Ce processeur généraliste effectue le maximum de prétraitements possibles – ici filtrage passe-bas pour ne sélectionner qu’une station FM et démodulation du signal – avant de communiquer vers son interlocuteur, ici le PC qui servira de carte son et connecté par Ethernet au travers de ZeroMQ. Le subtil compromis tiendra toujours à traiter autant que possible en amont afin de réduire la bande passante nécessaire à transmettre à la prochaine unité de traitement, et la complexité de mise en œuvre de ce traitement ou les ressources disponibles. Au plus près du récepteur, nous nous contentons de traitements simples (car complexes à implémenter dans le FPGA tel que le PL du Zynq), mais excessivement rapides, dont le résultat est transféré au processeur local (par exemple le PS du Zynq) pour un prétraitement limité par la puissance de calcul relativement modeste de son double Cortex-A9, avant transfert vers le PC au travers du bus de communication relativement lent (par les standards de la radio logicielle) USB2, PC dont le processeur surpuissant se chargera de finaliser le traitement. Dans cet exemple, nous partons d’un signal échantillonné par le récepteur RTL-SDR à un multiple de 48 kHz, et ici les 24 × 48 kHz échantillons complexes échantillonnés sur 8 bits nécessiteraient 48000 x 24 x 2=~ 2,3 MB/s de bande passante pour être transmis vers la plateforme de traitement suivante. En démodulant la FM sur la Raspberry Pi, nous réduisons le flux de données à des nombres flottants réels codés sur 32 bits au débit de 48 kéchantillons/s soit 192 kB/s. Le bénéfice en termes de bande passante est donc évident, et encourage à traiter au maximum de ce que la puissance du système embarqué permet en amont de la communication.
8. Interface graphique sur Raspberry Pi 3/4 : Qt5
Il peut parfois être intéressant de proposer une application autonome ne nécessitant pas d’ordinateur associé à la RPi. Étant donné que la RPi 4 propose un port micro-HDMI, une sortie graphique est envisageable. Afin de ne pas s’imposer la lourdeur de X11, il semble judicieux de communiquer directement avec la mémoire vidéo au travers du framebuffer.
Le support de Qt5 est extrêmement lourd et sa pertinence est à valider avant de se lancer dans cette compilation. En vue d’activer le support Qt5, nous devons sélectionner :
1. BR2_PACKAGE_QT5
2. BR2_PACKAGE_PYTHON3
3. BR2_PACKAGE_GNURADIO_PYTHON
4. BR2_PACKAGE_GNURADIO_QTGUI
5. BR2_PACKAGE_LIBERATION :
- le package qt5 devrait normalement être affiché, car dès le départ glibc a été sélectionnée à la place de uClibc ;
- compte tenu de la modification des options de gnuradio (activation de python et qtgui), il est primordial de relancer sa compilation avec make gnuradio-reconfigure ;
- le package liberation doit être manuellement activé, car par défaut, aucune police de caractères n’est présente.
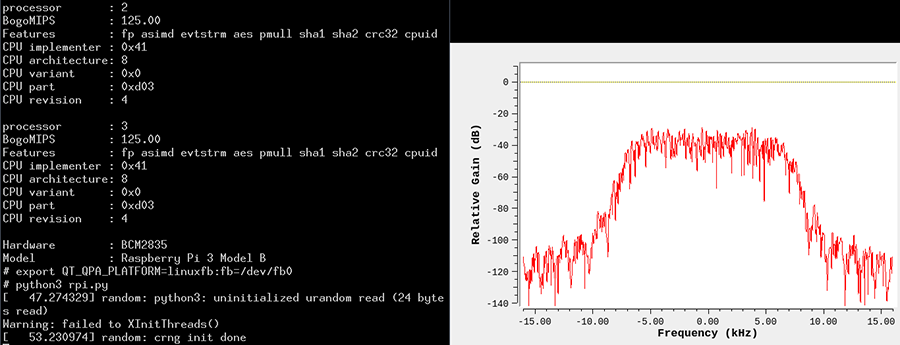
Une fois l’image résultante flashée sur carte SD et exécutée sur RPi 3 ou 4, une application Qt5 GNU Radio sera exécutée (ici, sur RPi 4) par python3 ./rpi.py -platform linuxfb:fb=/dev/fb0 pour envoyer sur un écran la sortie graphique (Fig. 4).
Les outils de capture d’écran proposés par Buildroot ne fonctionnent pas avec le framebuffer de la RPi 4. Les diverses illustrations de cet article sont obtenues en copiant directement le contenu de la mémoire du framebuffer cat /dev/fb0 > screen.raw et en convertissant la séquence de pixels bleu, vert, rouge et transparence en format plus commun compressé par convert -size 1280x800 -depth 8 bgra:screen.raw outfile.png en prenant bien entendu soin d’adapter la résolution de l’image à celle de l’écran connecté au port micro-HDMI de la RPi 4.
9. Développements logiciels
Grâce à la chaîne de compilation croisée fournie par Buildroot, la génération d’un exécutable pour notre cible se réduit trivialement à garantir que le compilateur aarch64-buildroot-linux-gnu-gcc de output/host/usr/bin de Buildroot se trouve dans le PATH, et à utiliser ce compilateur comme variable de CC dans le Makefile. À titre d’exemple avec l’utilisation de PiFM pour émettre un signal radiofréquence sur GPIO4 d’une RPi 4, nous téléchargeons https://github.com/ChristopheJacquet/PiFmRds, nous modifions le Makefile dans src qui fait l’hypothèse d’être exécuté sur la cible (jamais !) pour définir CC = aarch64-buildroot-linux-gnu-gcc et RPI_VERSION := 4, puis make se charge de générer pi_fm_rds que nous copions (scp) sur la cible pour l’y exécuter. Il est très amusant d’utiliser le récepteur DVB-T avec GNU Radio démodulant la FM pour recevoir le signal émis depuis la plateforme cible par PiFM : les deux applications cohabitent parfaitement comme démontré à http://jmfriedt.free.fr/201229_rpitx.mp4.
Nombre de logiciels sont cependant désormais proposés avec le générateur de Makefile nommé CMake qui facilite l’adaptation aux différentes distributions et systèmes d’exploitation pour compiler un logiciel libre vers une multitude de plateformes. Que ce soit pour modifier gnss-sdr ou notre propre décodeur de messages ACARS transmis par les avions vers le sol (Fig. 5), la compréhension de l’intégration des scripts de CMake dans Buildroot est indispensable. Afin de générer les Makefiles permettant de cross-compiler un programme vers la cible, nous utiliserons :
pour utiliser la toolchain de Buildroot et placer le résultat de la compilation dans l’image qui sera prête à être flashée sur carte microSD. Alternativement, on pourra compiler vers un répertoire cible quelconque sur le PC dont le contenu sera copié (scp) vers le répertoire /usr du système embarqué, si on ne veut pas reflasher une carte microSD avec une nouvelle image.
Nous nous intéressons à modifier les fonctionnalités de gnss-sdr. Le code source de ce logiciel, qui s’appuie sur GNU Radio, a été téléchargé et placé dans le répertoire output/build lors de sa sélection et installation. Le répertoire de compilation pour la cible se trouve à output/build/gnss-sdr-0.0.13/buildroot-build/ tandis qu’un répertoire séparé output/build/gnss-sdr-0.0.13/build permet de simultanément tester les modifications aux codes sources sur le PC hôte. Le résultat de la compilation (make), soit dans buildroot-build (cible ARM) ou build (cible x86), se trouve dans src/main/gnss-sdr.
10. Exécution dans QEMU
Supposons que nous n’ayons pas reçu le matériel adéquat, mais que nous désirions néanmoins nous entraîner avec Buildroot et les binaires générés. La RPi 4 est trop récente pour être intégrée dans QEMU, mais la RPi 3 est annoncée comme fonctionnelle. Nous installons donc QEMU émulant un processeur ARM 64 bits (paquets qemu-system-arm sous Debian/GNU Linux, qu’on complète tout de suite de qemu-system-gui pour le support de l’émulation de l’interface graphique) disponible avec l’exécutable qemu-system-aarch64. Ainsi, par :
nous exécutons le noyau Image qui charge la configuration matérielle bcm2710-rpi-3-b par son devicetree, lit le système de fichier accessible sur la seconde partition de sdcard.img, le tout sur une machine émulant la RPi 3 (option -M raspi3) avec 1 GB de RAM.
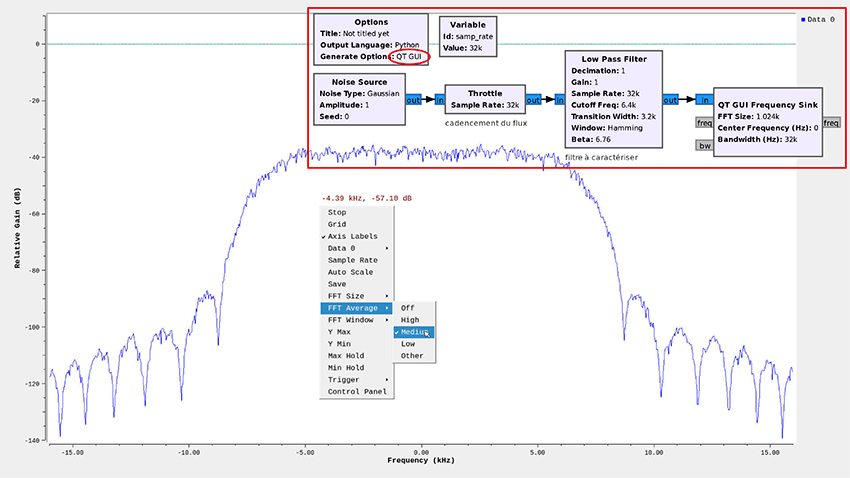
Afin de démontrer la capacité à même émuler le framebuffer, la Fig. 6 illustre une capture d’écran de la simulation d’un filtre passe-bas par GNU Radio.
Presque incroyable, QEMU peut même accéder au matériel physiquement connecté à l’hôte. À titre d’illustration, un récepteur DVB-T est connecté au PC qui exécute QEMU émulant la RPi 3 (Fig. 7). À droite lsusb sur l’hôte (PC) indique que le périphérique est reconnu sur le bus X=1, adresse Y=14 avec le Vendor ID de 0x0BDA et le Product ID de 0x2838 associé au Realtek 2832U. En passant ces paramètres comme argument de l’option -usb -device usbhost=X,hostaddr=Y, nous constatons (écran de gauche) que lsusb dans QEMU trouve bien le périphérique. L’exécution d’une chaîne de traitement faisant appel au DVB-T par la source Osmocom Source dans GNU Radio (en bas à droite) sur QEMU se traduit par l’appel au périphérique et l’acquisition de données. L’honnêteté nous impose de mentionner que cette capture d’écran est l’unique cas, sur une dizaine d’essais, où QEMU n’a pas crashé en capturant le flux de données, que ce soit en limitant l’acquisition à quelques échantillons (bloc head utilisé ici) ou en éliminant l’interface graphique. Le transfert USB au travers de l’émulation du bus USB est donc fonctionnel, mais incapable de supporter un débit de données important (quelques Méchantillons/s), ce qui ne retire rien à la prouesse technique de l’émulation de la RPi 3.

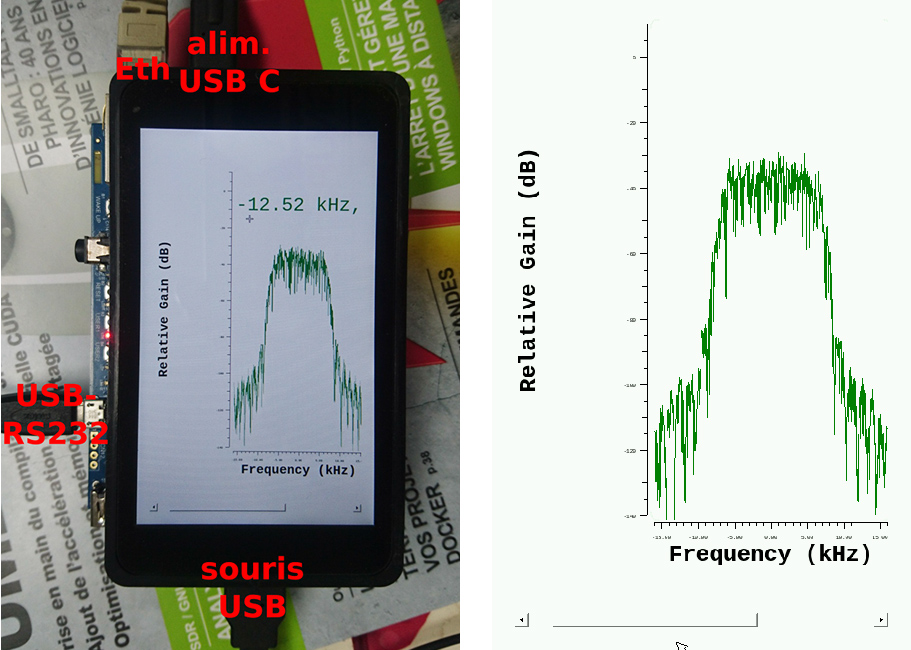
11. Interface graphique sur STM32MP157
Le STM32MP1 est un processeur proposé par STMicroelectronics couplant un processeur ARM Cortex-A7 capable d’exécuter GNU/Linux, et des petits Cortex-M4 dédiés à des tâches plus simples, sans se handicaper d’un système d’exploitation. Notre intérêt pour cette plateforme hétérogène tient en ses promesses de décharger le processeur principal en déportant certaines fonctions de traitement sur les coprocesseurs, sous hypothèse que le temps de communication ne dépasse pas le gain en temps d’exécution. Sans prétention de puissance de calcul, il s’agit d’une opportunité d’explorer les HMP (Heterogeneous Multi Processing) sans s’encombrer des difficultés de développement sur FPGA rencontrées sur Zynq. La carte d’évaluation proposée par STMicroelectronics nommée STM32MP157-DK2 possède un écran et est donc idéale pour démontrer comment les concepts exposés jusqu’ici sont transposables à toute plateforme supportée par Buildroot.
Ici encore, la capture d’écran se heurte à quelques soucis de compatibilité du framebuffer, puisque fbdump fonctionne (Fig. 8), mais fbgrab ne fonctionne pas.
12. Ajout de nouveaux paquets
Cette description des paquets est la partie la plus intéressante et celle sur laquelle nous travaillons pour ajouter le support de nouvelles applications, ici GNU Radio et ses bibliothèques associées.
Chaque paquet, qu’il s’agisse de bibliothèques ou d’applications, peut se voir comme une recette pour :
- décrire le paquet et ses relations avec les autres paquets (Config.in) ;
- décrire quels paquets doivent être construits avant pour générer l’arbre des dépendances et les options de configuration appliquées lors de la compilation selon les choix du développeur (fichier .mk).
Les relations entre paquets sont fondamentales lors de la génération de l’arbre des relations. Il existe deux types de relations :
- depends on : lorsque pkg1 dépend de pkg2, signifiant que pkg2 doit être manuellement activé avant de permettre la sélection de pkg1. Pour cette raison, un utilisateur qui lance make menuconfig ne verra pas apparaître certains paquets tant que les dépendances ne sont pas activées ;
- select : cette relation est la plus simple à utiliser puisque l’activation de pkg1 sélectionne automatiquement pkg2 sans intervention explicite pour activer ce dernier.
Pourquoi utiliser depends on au lieu de select ? Ce choix dépend de la situation : le support Python de GNU Radio est compatible soit avec Python 2, soit avec Python 3. Cependant, Buildroot ne peut pas déterminer quelle version activer : c’est donc à l’utilisateur de choisir la version activée au moment de la configuration. Une seconde raison est que si pkg2 présente beaucoup de dépendances, l’utilisation de select impose que l’ensemble de ces dépendances apparaisse dans la configuration de pkg1. Ceci ne limite donc pas la présence des depends on, mais complique la maintenance, car toute modification au niveau de pkg2 devra être appliquée à pkg1.
Compte tenu de l’absence des paquets qui ne sont pas encore visibles du fait des dépendances invalides, il est important de maîtriser le mécanisme de recherche qui proposera toutes les solutions répondant à un mot-clé et donnera éventuellement la solution pour faire apparaître ce paquet dans les menus. La recherche s’active, comme sous Vi, par « / » suivi du mot-clé.
Ce mécanisme de dépendances s’active lors de la première compilation, mais pose problème lors de l’évolution des configurations. En effet, en partant du fichier _defconfig, nous obtenons une image fonctionnelle, mais minimaliste ne proposant que quelques outils de BusyBox. Imaginons que nous voulions maintenant ajouter GNU Radio : make menuconfig et gnuradio nous permet d’atteindre ce résultat. Nous avons cependant oublié d’activer le support Python 3 et ne pouvons exécuter les scripts issus de GNU Radio Companion. Il faudra, lors de l’activation de Python 3 et de son support par GNU Radio, réactiver la configuration de ce dernier par make gnuradio-reconfigure pour que le support Python soit pris en compte. De la même façon, cette option est incompatible de uClibc – une implémentation minimaliste des appels systèmes de libc – mais nécessite d’utiliser la version plus complète qu’est glibc. Cette modification implique de recompiler toute la toolchain et tout ce qui a été compilé avec : inutile de tenter de sauver les meubles, autant tout recommencer du début en nettoyant le contenu de output par make clean et recommencer tout le processus de compilation de Buildroot.
Pour conclure cette discussion :
- si une option de la chaîne de compilation est modifiée, il faut recompiler tout Buildroot en repartant d’un répertoire output propre ;
- lors de la modification d’une option d’un paquet pkg impactant sur ses dépendances, ce paquet doit être reconfiguré manuellement par make pkg-reconfigure. En fonction de l’impact de cette modification, recompiler tout Buildroot est parfois plus simple.
Nous illustrons cette procédure d’ajout de paquets, tel que décrit en détail à http://buildroot.uclibc.org/downloads/manual/manual.html#adding-packages [11], sur l’exemple cité auparavant de gr-acars qui dépend de GNU Radio. Les fichiers que nous devons modifier pour ajouter ce support sont :
- le fichier package/gr-acars/gr-acars.mk qui contient :
-
fournissant le hash du dépôt Sourceforge de notre code, la méthode de téléchargement, la licence et les dépendances. Subtilité ici, la dépendance s’adapte à la version de Python (2 ou 3) qui a été utilisée lors de la configuration de GNU Radio ;
- le fichier package/gr-acars/Config.in qui contient la description du paquet tel qu’il apparaîtra dans l’interface utilisateur, avec :
On notera deux points dans ce fichier :
1. un select est utilisé pour gr-osmosdr, car sa liste de dépendances se limite à gnuradio. Comme gr-acars dépend également de gnuradio, il n’est pas nécessaire de faire usage de depends on ;
2. la ligne select BR2_PACKAGE_GNURADIO_FFT est commentée (présente à titre pédagogique), car cette option est activée par BR2_PACKAGE_GNURADIO_FILTER : il n’est pas donc pas nécessaire de l’activer une seconde fois.
- le fichier package/gr-acars/gr-acars.hash qui contient :
-
résultat de la commande sha256sum dl/gr-acars/gr-acars-fd70b325906e02b758b89786a6470d05bfee0a67.tar.gz puisque Buildroot clone le dépôt git avant d’assembler une archive compressée, les points de suspension étant la longue signature issue de la commande. Cette signature valide donc l’intégrité du téléchargement.
- Finalement, le fichier package/Config.in est complété de :
-
pour faire apparaître le paquet nouvellement ajouté.
Suite à ces modifications, la recherche sur le terme ACARS dans make menuconfig fait apparaître gr-acars, qui sera compilé et inclus dans l’image s’il est sélectionné.
Conclusion
Nous avons porté GNU Radio et ses dépendances à Buildroot en vue de l’exécuter sur la multitude de plateformes embarquées supportées par cet environnement de cross-compilation, dont les Raspberry Pi 3/4. Nous avons ainsi les bases pour ensuite y exécuter des infrastructures aussi complexes que gnss-sdr. Ce faisant, nous avons découvert les limites de Buildroot (absence de détection de modification de configuration d’un paquet), mais aussi la souplesse avec laquelle de nouveaux paquets peuvent être ajoutés. Une infrastructure aussi complexe que GNU Radio, avec ses multiples dépendances pour supporter une large gamme d’interfaces d’acquisition et de communication allant jusqu’à l’interface graphique en Qt5, est désormais supportée par Buildroot. Le gain en performance d’une compilation dédiée à une cible précise est incontestable face à une distribution binaire généraliste. Les préceptes du développement de systèmes embarqués de tirer le meilleur parti des ressources disponibles et de minimiser l’empreinte mémoire et la consommation énergétique pour atteindre les performances requises sont donc atteints.
Références
[1] P. Ficheux, Introduction à Buildroot, GNU/Linux Magazine Hors-Série n°47 (avril 2010) :
https://connect.ed-diamond.com/GNU-Linux-Magazine/GLMFHS-047/Introduction-a-Buildroot
[2] D. Bodor, Créer une configuration Buildroot sur mesure, Open Silicium n°10 (mars 2014) :
https://connect.ed-diamond.com/Open-Silicium/OS-010/Creer-une-configuration-buildroot-sur-mesure
[3] D. Bodor, Personnaliser Buildroot : précisions et compléments, Open Silicium n°11 (juin 2014) :
https://connect.ed-diamond.com/Open-Silicium/OS-011/Personnaliser-Buildroot-precisions-et-complements
[4] P. Ficheux, Linux embarqué – Mise en place et développement, Eyrolles (2017).
[5] G. Goavec-Merou, J.-M. Friedt, Never compile on the target! GNU Radio on embedded systems using Buildroot – feedback on a graduate course on developing an embedded network analyzer, FOSDEM 2021 (Free Software Radio devroom).
[6] L. Delmas, Facilitez le déploiement de vos Raspberry Pi en créant vos propres images préconfigurées, Hackable n°35, pp.66–83 (2020) : https://connect.ed-diamond.com/Hackable/HK-035/Facilitez-le-deploiement-de-vos-Raspberry-Pi-en-creant-vos-propres-images-preconfigurees
[7] C.J. Murray, The Supermen: The Story of Seymour Cray and the Technical Wizards Behind the Supercomputer, John Wiley & Sons (1997) et plus récemment D. Patterson & A. Waterman, SIMD Instructions Considered Harmful (2017) à https://www.sigarch.org/simd-instructions-considered-harmful/
[8] J.-M. Friedt, D. Rabus, G. Goavec-Merou, Software defined radio based Global Navigation Satellite System real time spoofing detection and cancellation, Proc. GNU Radio Conference 2020 à https://pubs.gnuradio.org/index.php/grcon/article/view/73
[9] P. Ficheux, Buildroot vs Yocto vs le reste du monde, Open Silicium n°20 (octobre 2016) :
https://connect.ed-diamond.com/Open-Silicium/OS-020/Buildroot-vs-Yocto-vs-le-reste-du-monde
[10] C.E. Shannon, Communication in the presence of noise, Proc. IRE 37 (1) 10–21 (1949).
[11] Bootlin, Buildroot training (2020) à https://bootlin.com/doc/training/buildroot/buildroot-slides.pdf



