

 Ajouter à une liste de lecture
Ajouter à une liste de lecture
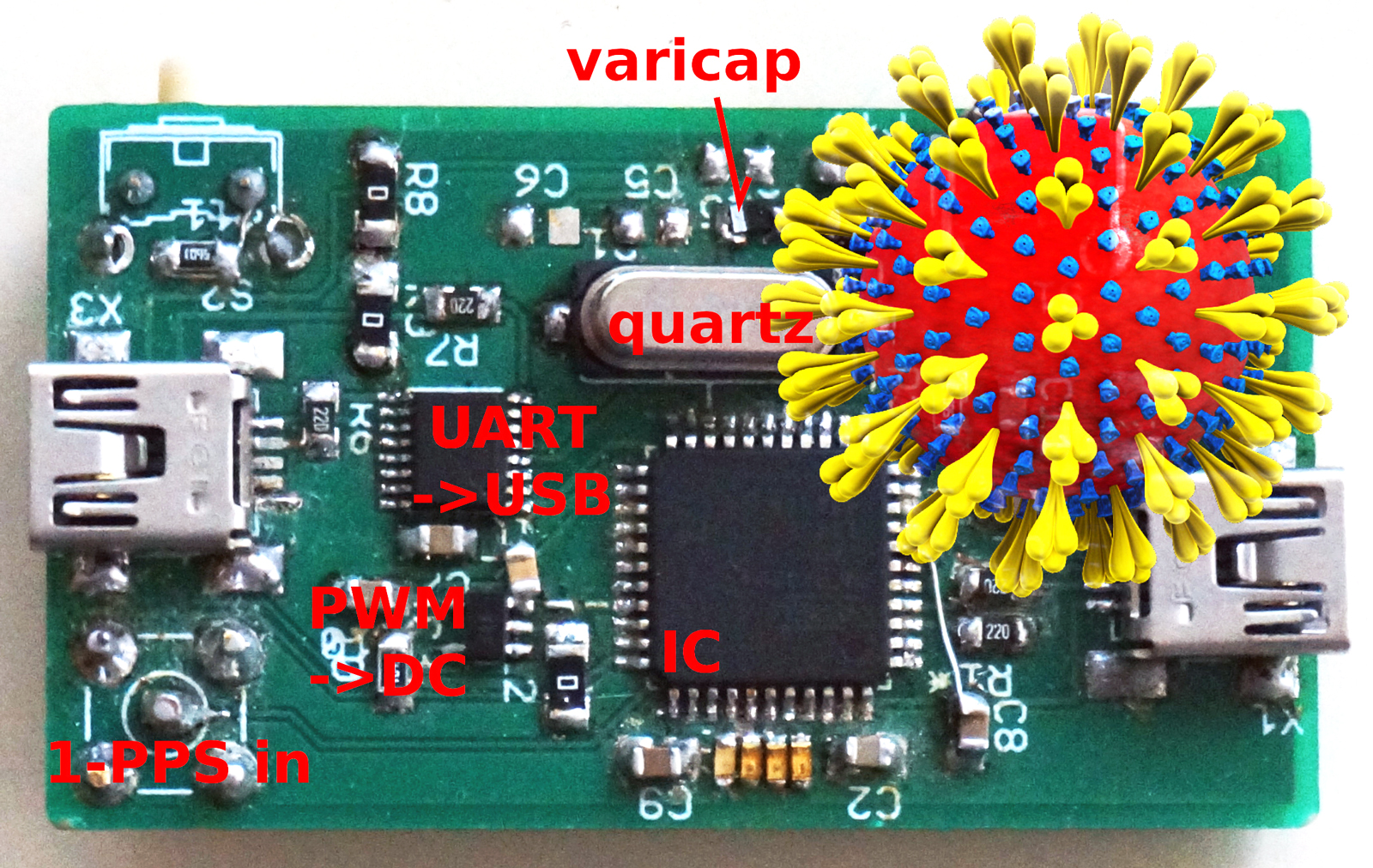
Il existe de nombreux cas où le matériel n’est pas disponible pour développer un système embarqué, que ce soit parce que la carte commandée n’a pas encore été livrée, parce que le collègue chargé de la conception du circuit imprimé a fait une erreur ou est en retard, ou parce qu’un virus interdit l’accès aux salles de travaux pratiques de l’Université (Fig. 1). Pour toutes ces raisons, nous désirons appréhender le développement d’un système embarqué sur un émulateur, c’est-à-dire un logiciel capable de fournir une représentation fidèle du comportement du dispositif réel, incluant ses latences et temporisations.
Nous avions proposé [1] l’utilisation d’émulateurs pour appréhender le développement du code embarqué (firmware) sur divers microcontrôleurs, de la petite architecture 8 bits de l’Atmega de Atmel (maintenant Microchip) aux gros ARM, RISC-V et MIPS capables d’exécuter GNU/Linux. Dans tous ces cas, nous nous étions arrêtés au firmware, sans considérer l’émulation du circuit imprimé qui entoure le microcontrôleur et lui injecte potentiellement des stimuli, que ce soit sous forme de signaux binaires (GPIO pour General Purpose Input Output) ou messages (série sur bus USART ou parallèle sur un port de GPIO). Nous allons combler cette lacune en appréhendant l’émulateur de petits microcontrôleurs de la gamme Atmega simavr non plus au niveau du cœur du processeur, mais des périphériques qui l’entourent. En particulier, nous constaterons que l’utilisation des interruptions devient naturelle dès qu’il y a interaction du microcontrôleur avec son environnement. Par ailleurs, nous verrons que l’accès au temps émulateur – et non pas au temps du système d’exploitation de l’hôte sur lequel s’exécute l’émulateur – permet d’injecter des signaux avec une grande précision temporelle dans le référentiel de l’émulateur, une propriété fondamentale pour résoudre le problème qui nous intéressera, à savoir l’asservissement de l’oscillateur cadençant le microcontrôleur sur la référence supposée exacte qu’est le signal de temporisation 1-PPS issu d’un récepteur GPS (virtuel) [2].
Nous supposerons que le lecteur, travaillant sous GNU/Linux, a acquis les sources de simavr à https://github.com/buserror/simavr et l’aura compilé par make dans sa racine après les quelques modifications suivantes, qui seront l’occasion de voir que les sources de l’émulateur sont limpides à analyser. Afin de nous faciliter la visualisation de l’état des ports, nous complétons la fonction avr_ioport_write() de simavr/sim/avr_ioport.c avec :
et de la même façon nous pouvons observer l’initialisation du port série dans simavr/sim/avr_uart.c en complétant :
Aucune subtilité de compilation, si ce n’est d’avoir installé la version de développement de libelf pour compiler cet outil, et éventuellement les bibliothèques OpenGL pour profiter des interfaces graphiques des exemples. La compilation des firmware des exemples de simavr impose d’avoir installé le cross-compilateur avr-gcc (paquet gcc-avr dans Debian GNU/Linux avec sa dépendance avr-libc qui peut être pratique).
1. GPIO
Le cas du GPIO en sortie ne présente à peu près aucun intérêt puisque simavr affiche l’état des registres manipulés, y compris ceux chargés de définir le statut des ports d’entrée-sortie, mais fournit l’opportunité d’introduire l’arborescence du projet, le fichier de définition d’un circuit imprimé et les nomenclatures à respecter pour exploiter les Makefile de simavr.
Soit le programme trivial suivant pour faire clignoter périodiquement une LED connectée à la broche 5 du port B :
qui se compile avec avr-gcc par avr-gcc -mmcu=atmega32u4 -O2 prog.c en supposant que le code source est stocké dans le fichier prog.c et s’exécute sur un Atmega32U4. Ce programme définit le bit 5 du port B en sortie (DDRB) et fait clignoter la LED connectée à ce port (PORTB) avec une période de 400 ms. Nous n’avons pas besoin de rechercher dans la datasheet l’emplacement des ports, le fichier d’en-tête io.h et ses dérivés dans /usr/lib/avr/include/avr définissant un certain nombre de constantes en cohérence avec la nomenclature d’Atmel dans ses documentations.
Cependant, en tentant d’exécuter ce programme dans simavr par simavr/run_avr a.out, nous nous faisons insulter : la nature du processeur n’a pas été renseignée, avr_make_mcu_by_name: AVR ’’ not known, car simavr ne sait pas quel cœur émuler. Nous pouvons tricher en explicitant ces paramètres par run_avr -m atmega32u4 -f 16000000, mais ce n’est pas l’approche sélectionnée dans cet article, qui visera à décrire un circuit imprimé équipé d’un processeur de modèle connu.
Que faut-il ajouter pour exécuter ce fichier depuis un circuit imprimé embarquant le microcontrôleur et décrit selon les préceptes de simavr ? Premièrement, si le circuit imprimé est décrit dans le fichier intro.c – et ce programme sera exécuté sur le processeur exécutant simavr, donc probablement un processeur compatible Intel x86 et non pas une architecture AVR – alors la structure des Makefiles des exemples de simavr impose d’appeler le firmware correspondant – qui lui s’exécutera sur le microcontrôleur – avec un nom de la forme atXXX_intro.c. Nous constatons ceci en lisant un des Makefile des exemples contenus dans examples/board* et en observant la règle firm_src = ${wildcard at*${target}.c} avec target= intro dans ce cas. Ainsi, le nom firm_src du logiciel embarqué se déduit de target préfixé de at et, pour faciliter la lecture, le nom du processeur cible. Nous reprenons donc notre prog.c pour le renommer atmega32u4_intro.c : contrairement à l’habitude sous UNIX, cette fois les noms de fichiers ont une importance (on verra que ce n’est pas la dernière fois). Ensuite, il faut compléter le programme avec quelques définitions qui seront exploitées par le compilateur pour savoir quel processeur appréhender : ces instructions n’affecteront pas le firmware flashé à terme dans le vrai microcontrôleur, mais sont contenues dans l’exécutable au format ELF fourni à simavr. Nous allons préciser que nous travaillons sur Atmega32U4 en ajoutant, après les en-têtes, les lignes :
Ce programme se compile toujours de la même façon en ajoutant (option -I) le répertoire de simavr contenant le fichier d’en-tête, soit :
et s’exécute de la même façon, en faisant appel à simavr au travers de la commande :
pour cette fois convenablement s’exécuter et indiquer :
Ça y est, la simulation est bien partie, mais est toujours faite en explicitant run_avr et non pas en passant par la description d’un circuit imprimé.
Nous rédigeons donc un fichier intro.c qui contient :
qui décrit le circuit imprimé... qui n’est ici fait de rien d’autre qu’un microcontrôleur dont le firmware est chargé après avoir été lu au format ELF. Nous avons choisi de conserver la nomenclature par défaut des makefiles proposés dans examples/board* de nommer le fichier ELF du nom du code source avec l’extension axf, mais il est tout à fait envisageable de compiler à la main et fournir a.out comme nom d’exécutable.
La simulation s’exécute dans la boucle infinie faisant appel à avr_run() : cela sera important pour la suite de la discussion et la génération des stimuli.
Évidemment, nous désirons automatiser la compilation par Makefile : partant de l’exemple fourni dans examples/board_ledramp que nous copions dans le répertoire de travail, nous modifions le nom de target et tentons de compiler par make.
Ici, nous devons passer par une étape fort peu élégante pour contourner un dysfonctionnement du Makefile. Soit nous créons à la main le répertoire obj-x86_64-linux-gnu, et dans ce cas make est satisfait, soit nous remontons au sommet de l’arborescence de simavr, nous nettoyons le projet par make clean, et nous le recréons par make qui fabrique le répertoire manquant dans notre exemple avant de peupler le répertoire examples/parts, cause de l’erreur fatal error: opening dependency file obj-x86_64-linux-gnu/intro.d: No such file....
Dans ce second cas, nous aurons pris soin de nommer le répertoire contenant le projet d’un nom commençant par board, par exemple board_intro, pour qu’il soit compilé, puisque c’est selon ce critère que le Makefile de examples balaie les répertoires d’après la règle for bi in ${boards}; do $(MAKE) -C $$bi; done.
Tout ceci étant fait, nous émulons le circuit imprimé (sans appeler explicitement run_avr) par ./obj-x86_64-linux-gnu/intro.elf qui donne le même résultat que précédemment.
Qu’avons-nous gagné si le résultat est le même qu’avant ? Nous avons maintenant la possibilité d’instancier des périphériques ! Ajoutons par exemple un bouton-poussoir connecté au port C3 :
Ce programme définit la structure button_t, l’initialise et lui associe des événements liés à C3, se compile et s’exécute pour donner strictement le même résultat qu’avant, puisque évidemment appui ne change jamais d’état. On notera que dans la nomenclature de simavr, appuyer sur un bouton signifie le passer à l’état bas, et son état par défaut (équivalent à une résistance de tirage en pull-up) est défini par avr_raise_irq(button...,1). L’utilisation des termes « irq » est quelque peu trompeuse, car fait référence au transfert d’événements asynchrones – qui peuvent se déclencher à tout moment – entre le circuit imprimé (PCB – Printed Circuit Board) et le firmware exécuté par le cœur, mais la détection de l’état du port se fera en mode polling sans activer les interruptions de changement d’état de broche PCINT, ou de niveau INT (nous ferons cela plus tard). Cette affirmation est confirmée par le commentaire « IRQ stands usually for Interrupt Request, but here it has nothing to do with AVR interrupts » de http://fabricesalvaire.github.io/simavr/doxygen/group__sim__irq.html.
C’est ici que nous découvrons l’importance d’avoir la simulation cadencée dans la boucle infinie appelant avr_run() : il nous faut une seconde boucle infinie pour cadencer les événements extérieurs. Il y a plusieurs religions :
- sûrement par souci d’égayer leurs simulations avec des interfaces graphiques (nous ferons de même à la fin de ce document), les auteurs de simavr ont choisi de faire appel à GLUT, l’OpenGL Utility Toolkit. Dans ce cas, OpenGL se charge de générer les événements (appui de touche, de souris ou de timer) de façon asynchrone, et avr_run() est relégué à son propre thread ;
- fort de cet enseignement, nous pouvons créer notre propre POSIX-thread (pthread_create()), y placer soit avr_run(), soit le séquenceur d’événements, et ainsi voir les deux boucles infinies tourner en parallèle ;
- soit faire appel aux signaux d’UNIX qui se déclencheront en arrière-plan de la boucle infinie qui exécute avr_run().
Bien qu’aucune de ces solutions ne soit la bonne, tel que nous le découvrirons plus tard (section 2.1) en termes d’exactitude temporelle, nous poursuivons cette description, car elle permet de générer des stimuli complexes depuis l’émulateur du circuit imprimé vers le microcontrôleur, si la temporisation relative au quartz qui cadence le microcontrôleur n’a pas d’importance.
Nous choisissons ici le dernier cas, qui nécessite le moins d’investissement intellectuel puisque SIGALRM se déclenche toutes les secondes par signal(SIGALRM, handle_alarm); alarm(1); et que le gestionnaire d’alarme handle_alarm() réenclenche le compte à rebours. Ainsi, nous ajoutons au code précédent :
Comme nous ne savons pas passer d’argument au gestionnaire de signal handle_alarm(), nous appliquons les préceptes des gestionnaires d’interruptions d’exceptionnellement nous autoriser une variable globale (appui), de type volatile pour interdire au compilateur de l’optimiser, qui partage l’information entre le handler et la boucle exécutant avr_run().
Finalement, il reste à voir si le bouton est bien appuyé : en l’absence de communication pour le moment, nous modifions le masque d’allumage du port B en fonction de l’appui sur C3 :
Ainsi, le bouton-poussoir reste appuyé 300 ms (pour rappel, if (appui==1) {button_press(b, 300000);appui=0;}) et se réenclenche toutes les secondes (alarme(1);), tandis que le firmware change l’état du port B toutes les 100 ms. Nous nous attendons à voir deux (ou trois) changements consécutifs du masque, puisqu’il reste au même état pendant le reste de la seconde qui s’écoule. Cependant :
donc nous constatons que le bouton est appuyé (notre gestionnaire de temps sur l’émulation du PCB nous en informe par le message “PCB: pushed”) puis relâché (message de simavr “button_auto_release”), mais le nombre de messages laisse cependant à désirer. La temporisation imposée par le programme émulant le PCB qui contrôle simavr est fausse, il y a clairement plus d’une seconde écoulée entre la fin de l’appui et l’appui suivant.
En effet, comme attendu, nous avons 3 messages entre “pushed” et “auto_release” correspondant à trois intervalles de temps de 100 ms : les 300 ms de l’émulateur de PCB sont comptabilisées comme 3 fois 100 ms par le microcontrôleur. Cependant, nous avons une trentaine de messages de transitions d’état entre la fin de l’appui et l’appui suivant, soient environ 3 s dans le temps interne du microcontrôleur. Cette valeur est incohérente, notre 1-PPS ne dure pas du tout 1-seconde.
1.1 Du temps faux au temps juste
La source de notre erreur apparaît à la lecture de examples/parts/button.c et sa fonction button_press() dont la temporisation est observée correcte. Nous constatons que la durée d’appui est enregistrée auprès d’un timer géré par simavr qui appelle, à expiration, la fonction de callback qui relâche le bouton. Dans notre approche, la temporisation est prise en charge par le système d’exploitation exécutant le simulateur de PCB, dont le temps n’a aucune raison de s’écouler au même rythme que le temps interne du simulateur (sans parler des fluctuations induites par l’absence de contraintes temps réel de GNU/Linux). Nous reprenons donc l’émulateur de PCB en modifiant l’appel au signal alarm() par un appel au gestionnaire de timer interne à simavr grâce aux fonctions avr_cycle_timer_cancel(); et avr_cycle_timer_register_usec();. L’émulateur de PCB intro.c devient donc :
qui a été épuré au maximum en éliminant le code redondant avec l’exemple précédent. Nous n’avons plus besoin de signal() ou alarm(), cette fois tous les événements d’appui (callback nommé PPS()) et de relâchement du bouton sont pris en charge par les timers de simavr.
Fort de ces modifications, le résultat devient cohérent avec la temporisation attendue puisque :
avec au début 10 transitions de 100 ms chacune avant que le bouton soit appuyé une première fois, puis un appui pendant 3 transitions correspondant à 300 ms, et un bouton relâché pendant 7 transitions ou les 700 ms restantes. Il ne reste plus qu’à décommenter l’ordre PORTB=0x00 lors de l’appui du bouton pour obtenir un masque cohérent qui avance d’un bit à chaque appui du bouton.
Cette longue introduction sur le cas du GPIO nous a armés pour la suite des hostilités : nous savons créer un PCB, lui assigner une architecture de processeur et son firmware, exciter des signaux extérieurs et constater la cohérence avec les temporisations attendues. Passons aux choses sérieuses que sont les communications et interruptions sur événements timers.
Nous nous proposons de tester simavr sur un cas pratique que nous avions exposé dans [2] – moins impressionnant que https://github.com/buserror/simreprap qui émule une imprimante additive 3D complète et sera source d’inspiration pour appeler certains périphériques – mais qui sert encore de prétexte à appréhender les divers périphériques de processeurs, à savoir l’asservissement d’un oscillateur à quartz sur le signal horaire de référence issu d’un récepteur GPS.
Un récepteur GPS est avant tout un instrument dédié à reproduire une horloge locale suffisamment stable pour dater avec précision les signaux horaires transmis par la constellation de satellites, et éventuellement par trilatération de positionner son propriétaire dans l’espace. L’information de base fournie par un récepteur GPS, avant cette information de position, est une impulsion périodique générée chaque seconde – 1-PPS (1-Pulse Per Second) – dont le front montant indique, avec une précision de +/- 100 ns environ [4, Figs.2–4], le début de la seconde GPS.
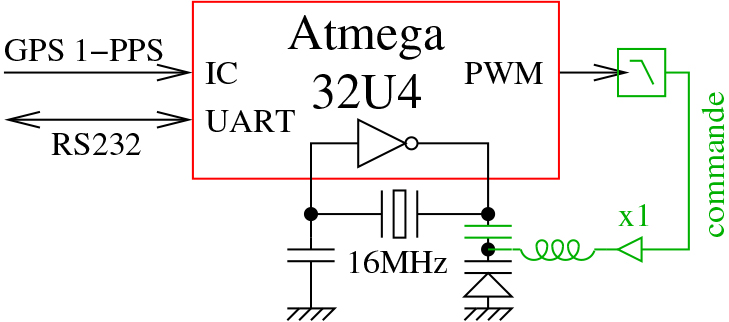
Toute fluctuation de l’oscillateur local qui cadence le microcontrôleur entre deux fronts montants du 1-PPS s’observe comme une variation du compteur dont une interruption input capture est déclenchée par ce front. Trop lent, le décompte sera inférieur à la fréquence nominale du résonateur à quartz, trop rapide et le décompte sera supérieur à cette valeur. En plus d’observer cette dérive de la fréquence du résonateur à quartz face au 1-PPS de référence, supposé parfait, nous pourrons corriger cette erreur de fréquence en ajustant les conditions d’oscillations dites de Barkhausen : la rotation de phase le long d’un oscillateur doit être multiple de 2π. Étant donné que dans un microcontrôleur l’amplificateur est formé d’une porte inverseuse (NOT) qui introduit donc une rotation de phase de 180°, et que le résonateur n’introduit pas de rotation de phase à la résonance (le circuit résonant formé d’une inductance et d’une capacité en série voit les deux réactances s’annuler à la résonance) et il reste les deux condensateurs de pieds – typiquement quelques dizaines de pF – reliant chaque borne du résonateur à quartz à la masse pour vérifier la condition de Barkhausen sur la phase. En jouant sur ces valeurs de condensateurs, nous pouvons abaisser la fréquence d’oscillation de quelques parties par million (ppm) et ainsi ajuster la fréquence d’oscillation. Un condensateur commandé en tension est une varicap. Comme le microcontrôleur Atmega32U4 ne possède pas de convertisseur analogique numérique, le signal de commande sera généré par une sortie en modulation de largeur d’impulsion PWM suivie d’un filtre passe-bas pour la lisser et fournir une tension continue égale à la valeur moyenne : la commande se traduira donc par une modification du rapport cyclique de la PWM (en vert sur Fig. 2).
Résumons donc les périphériques dont nous aurons besoin (Fig. 2) et que nous simulerons sur simavr :
- la communication pour interagir avec l’utilisateur au travers du port série de communication asynchrone compatible RS232 ;
- un timer avec une résolution aussi bonne que possible pour mesurer la fréquence du quartz entre deux fronts montants du 1-PPS détectés par input capture qui se charge de mémoriser l’état du compteur au moment de l’événement ;
- un timer en PWM pour commander la varicap et de ce fait la fréquence de l’oscillateur cadençant le microcontrôleur, variable à laquelle nous aurons accès dans la configuration du microcontrôleur équipant le PCB ;
- pour être complet, un bouton-poussoir déclenché par interruption pour laisser l’opportunité à l’utilisateur d’interagir avec son instrument.
Nous allons aborder chacun de ces périphériques dans les sections qui suivent.
2. Communication asynchrone du monde extérieur vers le processeur
Commençons par communiquer. Le port de communication série asynchrone, compatible RS232, s’initialise en activant les divers paramètres que sont le débit de communication (baudrate), nombre de bits/symboles transmis, présence ou non de bits de parité, des choses très standard :
Écrire sur le port série s’obtient en vérifiant que le périphérique est libre, et en stockant dans le registre adéquat l’octet à communiquer, le matériel se chargeant ensuite de générer les signaux :
L’émission d’un message d’un périphérique vers le microcontrôleur n’étant pas déterministe, la « bonne » façon de gérer la communication n’est pas d’attendre que le message arrive, mais de déclencher une interruption sur la réception du caractère, le stocker dans un tampon afin de prévenir la boucle du programme principal de gérer le message quand il en a le temps. Le vecteur d’interruption USART1_RX_vect correspondant à l’UART1 est appelé quand un tel événement survient sous réserve d’avoir activé la fonctionnalité par le bit RXCIE1 de UCSR1B. Nous proposons par ailleurs d’activer le traçage de toutes les interruptions pour en observer l’évolution dans le temps :
Du point de vue du PCB, communiquer du microcontrôleur vers l’utilisateur ne présente aucune difficulté puisque simavr affiche sur la console tout caractère transmis sur le port de communication asynchrone. Plus difficile, envoyer un symbole de l’utilisateur vers le microcontrôleur, qui impose de connecter un terminal à simavr pour en capturer les messages. Ceci s’obtient dans le code d’émulation du PCB par :
pour connecter un terminal à UART1 (dernier argument de uart_pty_connect()). Selon le programme proposé plus haut, nous affichons le dernier symbole mémorisé toutes les 200 ms, et mettons à jour le symbole si une communication de l’utilisateur vers le microcontrôleur a eu lieu afin de vérifier le bon fonctionnement de l’interruption.
À l’exécution, simavr nous informe que :
et en nous exécutant, nous obtenons le résultat de la Fig. 3.
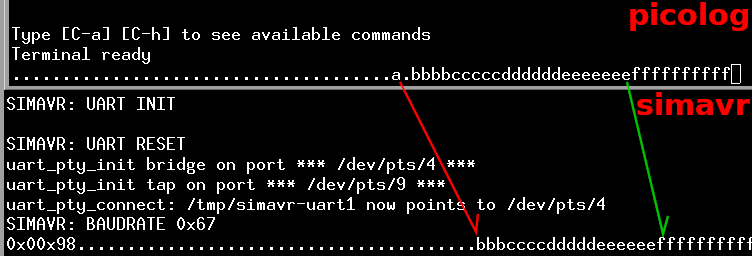
Très intéressant grâce à la fonction de traçage des signaux internes au microcontrôleur, nous observons avec gtkwave la trace au format VCD (Value Change Dump) qui contient l’état des interruptions (Fig. 4) et constatons que l’interruption 0x19=25 s’est déclenchée, en accord avec la documentation technique [3, p.57] qui, en indexant les interruptions à partir de 1 et non de 0, indique que “USART1 Rx Complete” est l’interruption numéro 26.

3. Interruptions : input capture, PWM et GPIO
Passons désormais aux timers. Il s’agit de périphériques forts simples, mais forts utiles : un compteur tourne continuellement, atteint sa valeur maximale qui peut être source d’interruption (overflow) pour revenir à 0, et nous pouvons potentiellement déclencher des événements le long du décompte, par exemple un changement d’état de broche pour moduler le rapport cyclique en mode PWM en maintenant une période constante. Plus intéressant dans notre cas, ce compteur peut être mémorisé lors du déclenchement d’un événement externe tel que la transition d’état sur une broche : il s’agit du mode input capture qui nous permettra de compter le nombre d’oscillations du circuit cadençant le microcontrôleur entre deux fronts montants du 1-PPS.
3.1 PWM
La PWM est sous le contrôle du microcontrôleur, donc notre seul objectif ici est de récupérer depuis l’émulateur du PCB l’information que la tension de commande de la varicap a été modifiée, entraînant une modification de la fréquence d’oscillation du circuit cadençant le microcontrôleur, et modifier les variables d’émulation en conséquence. Nous nous inspirons pour cela de examples/board_timer_64led/timer_64led.c qui module l’intensité lumineuse de l’afficheur par le rapport cyclique de la PWM.
Le pendant dans le firmware exécuté sur le microcontrôleur est de périodiquement modifier la valeur de la PWM qui a été initialisée par :
Ce code affirme que la PWM s’incrémente toutes les 200 ms et se traduit, dans le code gérant le PCB, par un incrément de la fréquence de cadencement du microcontrôleur (avr->frequency) de (arbitrairement) 10 fois la valeur de la PWM, soit quelques kHz sur la gamme d’ajustement du timer, une valeur typique d’un résonateur à quartz. Comment pouvons-nous vérifier si ces affirmations sont exactes ? En analysant la valeur du timer configuré en input capture pour mesurer l’intervalle de temps entre deux fronts montants du 1-PPS.
3.2 Input Capture
Contrairement à la PWM où seule la simulation du circuit imprimé doit déclarer la gestion de l’événement de variation du rapport cyclique puisque le matériel gère cette configuration du timer dans le microcontrôleur, le cas input capture doit être pris en compte et dans le firmware, et dans le PCB.
Côté firmware, une gestion classique d’input capture sans originalité :
Dans cet exemple, nous comptons grossièrement l’intervalle de temps entre deux fronts montants du 1-PPS en mémorisant le nombre d’overflows (interruption TIMER3_OVF_vect indiquant que le compteur a atteint sa borne maximale – TOP dans la nomenclature Atmel) et avec précision cet intervalle de temps en mémorisant la valeur du compteur au moment de l’événement par input capture par l’interruption TIMER3_CAPT_vect. Le compteur est remis à 0 dans ce gestionnaire d’interruption pour mesurer un écart de temps entre deux fronts montants, et un drapeau est validé pour informer le programme principal que l’événement a eu lieu. Afin de caractériser la dépendance en boucle ouverte de la fréquence du quartz avec la valeur de la PWM, nous maintenons 5 fois de suite le seuil de transition de la broche correspondante à la même valeur, avant de l’incrémenter pour mesurer la fréquence avec cette nouvelle commande.
Côté PCB, nous générons une fois par seconde un événement représentatif du 1-PPS du GPS. Nous avons vu (section 2) que nous ne devions pas exploiter le temps hôte (ordinateur sur lequel s’exécute simavr), mais les timers de simavr pour induire une datation cohérente des événements. Qu’à cela ne tienne : nous utilisons deux timers de simavr, un pour déclencher le front montant toutes les secondes, et l’autre pour redescendre le signal une centaine de millisecondes après sa montée :
Le résultat de l’exécution de ce code est de la forme :
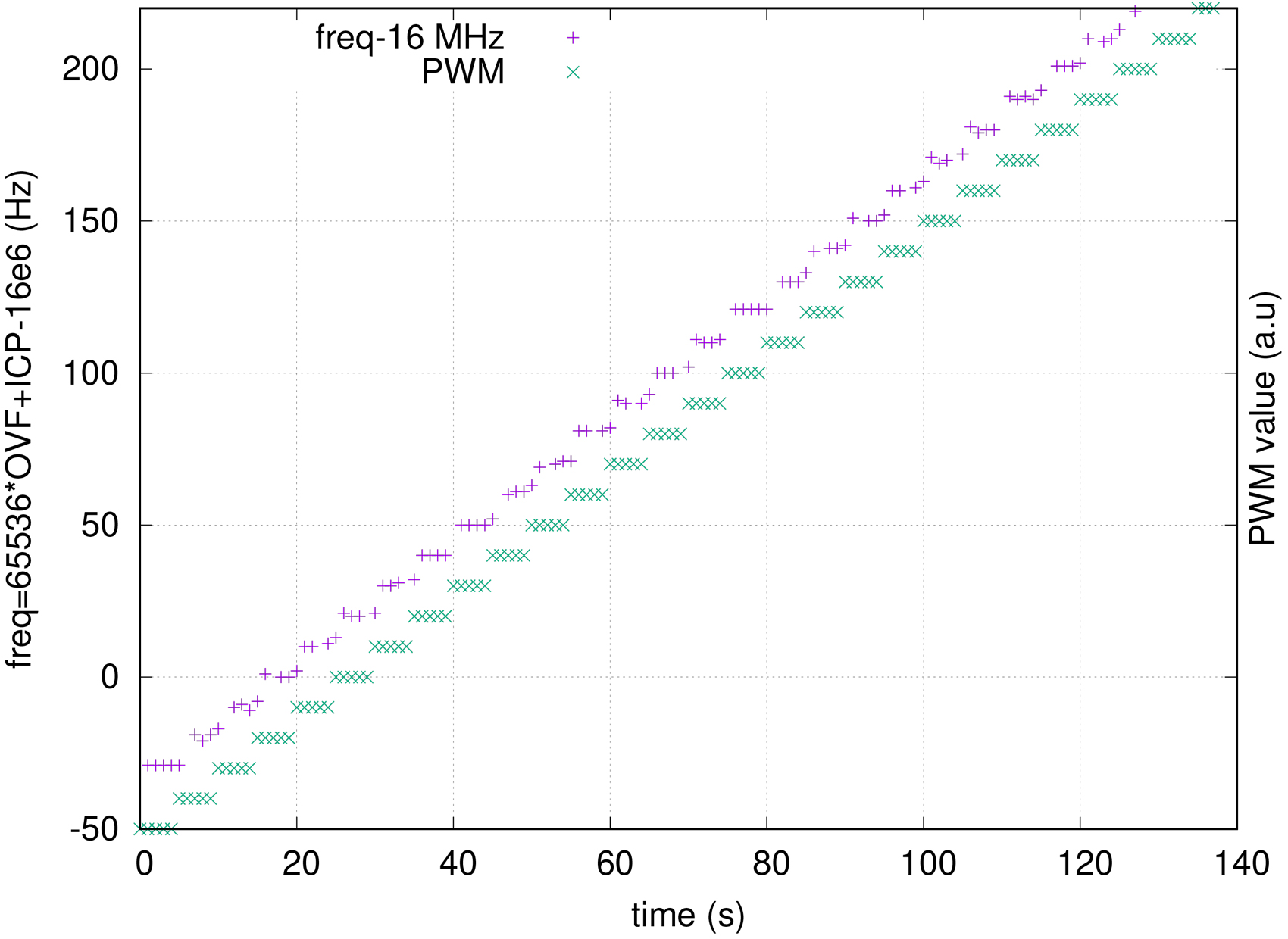
qui indique donc que 244 ou 245 overflows se déclenchent, et que le résidu entre deux fronts montants est de l’ordre (première ligne) de 9187. Ainsi, la fréquence du quartz est de l’ordre du nombre d’overflows multiplié par la valeur maximale du compteur (ici, 16 bits donc 65536) auquel on ajoute le résidu, soit 244 x 65536 + 9187=15,999971 MHz qui est raisonnablement proche des 16 MHz visés. Plus important, le PPS résultant de l’utilisation des timers de simavr est stable tel que le démontre la Fig. 5 dans laquelle l’incrément d’une unité de la PWM toutes les 5 mesures se traduit bien par une croissance de 10 unités de la fréquence.
4. Interruption GPIO
Afin de proposer un petit exercice sur les pointeurs, nous nous proposons de gérer un dernier type d’événement que sont les interruptions sur appui de bouton connecté à un GPIO. Nous n’avons pas d’application pratique dans ce contexte, mais nous allons voir que cela donne l’opportunité de nous amuser avec les cast.
Ainsi, nous ajoutons à notre séquence d’interruptions gérées par le firmware un bouton connecté (arbitrairement) à PD2, qui déclenche l’interruption sur niveau INT2 :
dans lequel nous ne mentionnons que les lignes ajoutées au cas précédent, puisque nous désirons à la fois gérer l’input capture du timer et cette interruption GPIO.
Côté simulation du PCB, nous déclarons la fonction de callback liée à l’événement de changement de niveau du GPIO, mais comme nous voudrons passer les deux gestionnaires d’interruptions (input capture et GPIO) en argument aux gestionnaires de temporisation de simavr ou au thread que nous allons déclarer plus tard pour gérer de façon asynchrone simavr, tandis que le gestionnaire d’interface graphique monopolise le processeur par sa boucle infinie, il nous faut une unique structure à passer comme argument. Nous allons donc déclarer un tableau de gestionnaires d’interruptions irq[2] :
Ainsi grâce à cette structure, nous pouvons passer l’unique pointeur comme argument aux fonctions appelées, par exemple avr_cycle_timer_register_usec() ici, et comprendre la puissance du typage void* qui détermine la nature de ce dernier argument. Un void* est un pointeur sur n’importe quoi, une zone mémoire contenant donc aussi bien un scalaire (char, short ou int) qu’une structure complexe. Il nous suffit, dans la fonction appelée, de caster ce pointeur vers la nature de la structure passée en argument pour expliciter l’organisation de la mémoire :
La première fonction est un callback d’un timer chargé de déclencher le signal 1-PPS. Lors de son déclenchement, le 1-PPS s’enregistre pour se redéclencher une seconde plus tard, et enregistre un second timer pour s’abaisser 200 ms plus tard en appelant la seconde fonction. Dans ces deux fonctions, nous avons choisi de manipuler simultanément PD2 (connectée à INT2) et input capture afin d’illustrer le passage du tableau d’interruptions. Dans les deux cas, l’organisation de la mémoire est obtenue par le cast avr_irq_t** irq=(avr_irq_t**) param; qui indique que la zone mémoire sans type void* param doit être interprétée comme un tableau de pointeurs vers les gestionnaires d’interruptions. Cette méthode de passage de paramètre est très générale puisque nous la retrouvons dans FreeRTOS (prototype des tâches crées par xTaskCreate() de la forme void vATaskFunction( void *pvParameters) telle que décrite à https://www.freertos.org/implementing-a-FreeRTOS-task.html, ou dans le noyau Linux avec le prototype du gestionnaire d’interruptions :
décrit à https://www.oreilly.com/library/view/linux-device-drivers/0596005903/ch10.html.
5. Ajout de l’interface graphique
Maintenant que les bases du programme fonctionnent, avec la PWM, input capture, communication et interruption GPIO actives, nous pouvons retourner aux aspects esthétiques en ajoutant une illustration afin de mettre cette démonstration au niveau des autres projets de examples/board*, et profiter de ce fait du passage de paramètres tel que nous venons de l’expliciter lors de la création du POSIX thread qui exécute l’émulateur.
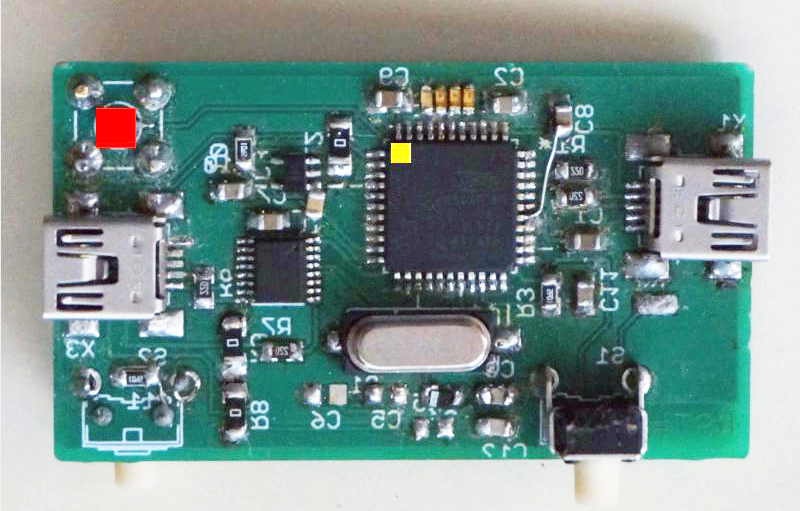
Nous n’entrons pas dans les détails des étapes, nous étant contentés de glaner des informations sur divers forums faute d’expérience sur la programmation en OpenGL, mais GLUT simplifie considérablement la gestion des événements graphiques tels que nous laisserons le lecteur le constater en consultant l’archive https://github.com/jmfriedt/l3ep/blob/master/board_project/PPScontrol.c. Nous voulions présenter à l’utilisateur les divers signaux transmis depuis le PCB au microcontrôleur et visualiser les réactions à ces stimuli. Ainsi, le 1-PPS est visualisé par un carré rouge sur le connecteur SMA auquel nous serions susceptibles de connecter la sortie du signal horaire d’un récepteur GPS, tandis que des carrés de diverses couleurs (jaune pour input capture du timer 3 dans l’exemple de la Fig. 6) sur le microcontrôleur représentent le déclenchement de l’interruption correspondante. Il ne reste qu’à rajouter autant de symboles dans la fonction d’affichage de l’image que de signaux à présenter, en conditionnant l’affichage du symbole sur le drapeau correspondant mis en place dans la fonction de callback (Fig. 6). La lecture de l’image JPEG en arrière-plan s’appuie sur libdevil telle que décrite à https://community.khronos.org/t/how-to-load-an-image-in-opengl/71231/6.
Comme nous l’avions mentionné dans [1], un des avantages d’un tel outil de simulation est la génération de conditions de mesure difficilement reproductibles expérimentalement, voire de systématiser les tests en balayant les signaux physiques comme le fait tout bon développeur avec les tests unitaires. Dans ce cas, il reste donc à induire une variation brusque de la fréquence du quartz telle que nous l’observerions en plaçant la panne d’un fer à souder dessus, et boucler l’asservissement sur le 1-PPS pour corriger cette dérive de fréquence en ajustant de façon appropriée le condensateur de pieds de l’oscillateur. La démarche suivie dépasse le cadre du présent article, mais est largement discutée dans le manuscrit qui accompagne le projet de Licence 3 qui a motivé cette étude [5] : nous sautons ici au résultat qui vise à démontrer le bon fonctionnement de la boucle d’asservissement fonctionnant sur le principe d’un contrôle proportionnel intégral (PI [6, 7]).
Le concept de commande proportionnelle, intégrale et dérivée (PID) issue des premières réflexions sur les pilotes automatiques [8, chap.1.6] se base sur l’idée de générer une commande sur un actuateur formé de la somme d’un terme proportionnel à la différence entre une observable et une consigne, d’un terme intégral (somme des valeurs passées) de cette différence, et éventuellement de la dérivée de cette différence. Nombre d’ouvrages décrivent la contribution de chaque terme – correction, annulation de l’erreur statique et éviter de trop brusquer la commande, mais ici nous nous intéressons uniquement à l’implémentation. La commande c(t) en temps continu t s’obtient à partir de l’erreur ε entre observable et consigne par c(t)=Kpε(t)+Ki∫0t ε(τ)dτ+Kddε/dt avec Kp, Ki et Kd des constantes à identifier, pour devenir en temps discret n : cn=Kpεn+Ki∑k=0nεk+Kd(εn−εn−1) en considérant la période d’échantillonnage unitaire. Afin d’éviter de voir la somme de l’intégrale diverger quand n devient grand, il est classique d’utiliser l’équation de récurrence sur cn en écrivant cn+1 et en constatant que cn+1-cn=Kp(εn+1+εn)+Kiεn+1+Kd(εn+1 -2εn+εn−1) puisque les termes de la somme ∑k=0n s’annulent. Ainsi, nous ne devrions pas écrire la solution suivante, mais celle juste en dessous :
Nous nous imposons de travailler sur des entiers uniquement, l’Atmega n’étant pas équipé d’une unité de calcul flottante, et donc choisirons une expression fractionnaire de Kp, Ki et Kd qui nous permet d’exprimer ces coefficients inférieurs à 1 dans le cas de notre système de gain supérieur à 1 (pour rappel, nous avons choisi de bouger la fréquence de 10 Hz pour une commande qui varie d’une unité). Lors de la mise en œuvre de l’algorithme de droite, nous avons constaté que l’erreur statique n’était pas annulée, mais que la commande faisant converger vers une valeur proche de la consigne, mais biaisée. En effet, dans la solution itérative, le terme intégral Kiεn s’annule si εn est plus petit que 1/Ki (dont nous rappelons qu’il est l’inverse d’un entier). Au contraire, si l’intégrale est conservée explicitement dans la solution de gauche, alors le terme ∑k=0nεk accumule tout l’historique des erreurs de l’asservissement et sa multiplication par Ki ne s’annule pas même si à un instant εn devient plus petit que 1/Ki : la commande continuera à annuler le biais statique jusqu’à ce que la somme devienne plus petite que 1/Ki, un cas qui se produit tard après que le biais ait été compensé. C’est donc la solution de gauche qui a été implémentée pour fournir les solutions de la Fig. 7.
Dans ce contexte, une erreur εn entre l’observable (la fréquence de l’oscillateur) à l’instant n et sa consigne est utilisée pour produire une commande cn formée de la somme de cette erreur multipliée par une constante Kp (terme proportionnel) et l’intégrale de cette erreur multipliée par une constante Ki (terme intégral) avec toute la subtilité du réglage des constantes pour minimiser le temps de convergence, tout en évitant de trop bousculer la commande. Alors qu’en temps continu, la méthode dite de Ziegler et Nichols [9] est classique, en temps discret l’approche est un peu différente, avec un point de départ pour régler Kp et Ki fournie par Takahashi [10, 11]. Dans ce contexte, sachant que nous avons choisi dans notre émulateur un facteur a=10 entre la commande (sortie de PWM) et la variation de fréquence, le gain est connu et le retard L supposé nul, car la commande agit immédiatement sur la fréquence sans devoir attendre une période Te de la boucle d’asservissement. Dans ce contexte, Takahashi prévoit donc Kp=0,27/a·(L+0,5Te)2 =~ 0,11 et Ki=0,9/a·(L+0,5Te)-0,5 Kix Te =~ 0,125. Comme nous travaillons sur microcontrôleur 8 bits sans unité de calcul en virgule flottante, nous nous imposons de ne travailler qu’avec des entiers et prendrons les inverses de ces coefficients dans l’implémentation de la loi de commande, soit 1/Kp =~ 9 et 1/Ki =~ 8. De ce point de départ, nous observons l’évolution de la fréquence de l’émulateur sous commande de la loi que nous venons de proposer : les divers régimes sont observés en Fig. 7.
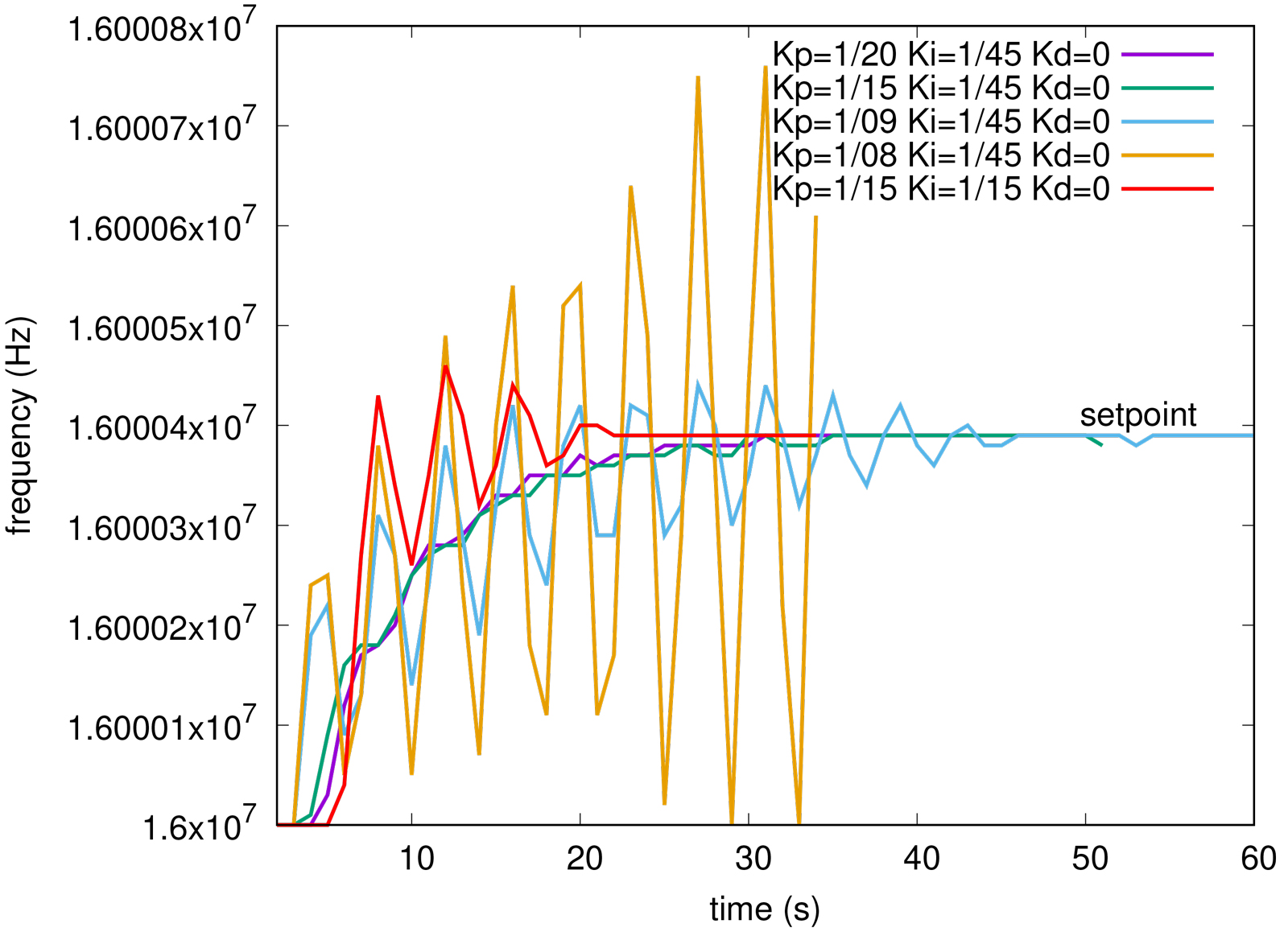
Nous constatons sur cette figure 7 que Takahashi est un peu optimiste et induit un régime d’oscillations qui, sur un système mécanique, se traduirait rapidement par un risque de rupture. En atténuant un peu la loi de commande en abaissant Kp ou Ki (i.e. en augmentant leur inverse), nous retrouvons des régimes soit excessivement atténués, soit proche de l’optimum avec un léger dépassement de consigne avant de converger vers la valeur recherchée (rouge sur la Fig. 7). La boucle d’asservissement est donc complètement fonctionnelle dans l’émulateur.
Conclusion
Un projet conçu pour être aussi expérimental que possible d’asservissement de la fréquence d’un oscillateur à quartz cadençant un microcontrôleur sur le 1-PPS de référence issu d’un récepteur GPS a été rendu virtuel, en nous appuyant sur simavr pour émuler le comportement du microcontrôleur Atmega32U4, mais surtout des divers périphériques qui le stimulent. Nous avons vu que grâce aux timers proposés par simavr, nous obtenons une simulation avec une base de temps commune à celle du microcontrôleur, tandis que les divers stimuli issus du microcontrôleur (gestion d’interruption, changement d’état de broche, communication ou variation de l’état d’une PWM) sont restitués à l’outil de simulation, permettant de fermer la boucle entre le traitement embarqué dans le firmware et l’environnement physique émulé. On notera dans ce contexte la capacité à enregistrer des séquences de mesures et à les rejouer comme stimuli tel que nous informe l’option [--input|-i <file>] A .vcd file to use as input signals de run_avr, malgré quelques contraintes quant à la nature des signaux injectés si l’on en croît https://github.com/buserror/simavr/issues/267.
Peu de déficiences sont apparues à l’usage de simavr, si ce n’est l’absence – pour le microcontrôleur Atmega32U4 qui nous concerne – du support du timer 4 dont nous avons facilement pu nous passer dans ce projet. Il est judicieux de vérifier quels périphériques sont émulés en cas de dysfonctionnement : ne voyant pas le compteur TCNT 3 du timer 3 s’incrémenter lorsque nous le placions en mode 11 (WGM3=WGM1=WGM0=1), il est apparu dans simavr/cores/sim_mega32u4.c (entrées .timer1 et .timer3) que ce mode n’est pas implémenté (tout comme les modes 8 à 10).
Nous n’avons par ailleurs pas abordé les multiples fonctionnalités additionnelles que sont la génération dynamique de fichiers de traces de changement d’état des signaux (format VCD) depuis l’émulateur de PCB, ou l’interaction avec gdb qui est très bien décrite dans [12]. L’auteur de simavr nous met cependant en garde que les valeurs des compteurs de timers ne sont calculées qu’à leur utilisation par le cœur de processeur, et que gdb sondant l’état de ces registres observera une valeur erronée qui ne s’incrémente pas en l’absence de sollicitation par un périphérique.
Le résultat de ce travail est disponible à https://github.com/jmfriedt/l3ep/ dans le sous-répertoire board_project à côté des divers exemples de code qui sont proposés en cours d’introduction à la programmation des microcontrôleurs 8 bits de Licence 3 de l’Université de Franche-Comté à Besançon.
Remerciements
M. BusError Pollet, auteur de simavr, a amélioré ce manuscrit par ses relectures des versions préliminaires, et motivé la finalisation de l’étude par sa disponibilité sur IRC. G. Cabodevila (enseignant-chercheur à l’École Nationale Supérieure de Mécanique et des Microtechniques) m’a enseigné la mise en œuvre en temps discret de la loi de commande proportionnelle, intégrale et dérivée, et l’identification des coefficients de pondération par la méthode de Takahashi ainsi que l’implémentation de la méthode itérative. Toutes les références bibliographiques qui ne sont pas librement disponibles sur le Web ont été acquises auprès de Library Genesis à http://gen.lib.rus.ec, une ressource indispensable à nos activités de recherche et d’enseignement.
Références
[1] J.-M. Friedt, Développer sur microcontrôleur sans microcontrôleur : les émulateurs, GNU/Linux Magazine HS 103 (2019), à https://connect.ed-diamond.com/GNU-Linux-Magazine/GLMFHS-103/Developper-sur-microcontroleur-sans-microcontroleur-les-emulateurs
[2] J.-M. Friedt & al., Les microcontrôleurs MSP430 pour les applications faibles consommations – asservissement d’un oscillateur sur le GPS, GNU/Linux Magazine France 98 (2007)
[3] Atmel, ATmega16U4/ATmega32U4 datasheet, révision 7766H (06/2014)
[4] U-Blox, GPS-based Timing Considerations with u-blox 6 GPS receivers – Application Note (2011) à https://www.u-blox.com/sites/default/files/products/documents/Timing_AppNote_(GPS.G6-X-11007).pdf
[5] Guide orientant l’asservissement d’un oscillateur à quartz sur un signal de référence horaire issu d’un récepteur GPS : http://jmfriedt.free.fr/projet_atmega.pdf
[6] N. Minorsky Directional stability of automatically steered bodies, J. American Society for Naval Engineers 34(2), pp. 280–309 (1922)
[7] K. Åström & T. Hägglund, PID controllers – 2nd Ed., Instrument Society of America (1995)
[8] S. Bennett. A History of Control Engineering 1930-1955, IET (1993)
[9] J.G. Ziegler & N.B. Nichols, Optimum settings for automatic controllers, Trans. ASME 64 pp. 759-768 (1942)
[10] Y. Takahashi, C.S. Chan & D.M. Auslander, Parametereinstellung bei linearen DDC-Algorithmen, Automatisierungstechnik (1971), 237-244
[11] A. Besançon-Voda & S. Gentil, Régulateurs PID analogiques et numériques, Tech. de l’ingénieur R7416 (1999), ou sans les fautes, le cours de Gonzalo Cabodevila disponible à http://jmfriedt.free.fr/Gonzalo_cours1A.pdf
[12] Manuel de simavr par J. Gruber dans le répertoire doc du projet, ou L. Kellogg-Stedman, Debugging attiny85 code (2019) à https://blog.oddbit.com/post/2019-01-22-debugging-attiny-code-pt-1/



